Q-Learning vs SARSA and Q-Learning extensions¶
Temporal-difference (TD) learning is a combination of these two approaches. It learns directly from experience by sampling, but also bootstraps. This represents a breakthrough in capability that allows agents to learn optimal strategies in any environment. Prior to this point learning was so slow it made problems intractable or you needed a full model of the environment.
In 1989, an implementation of TD learning called Q-learning made it easier for mathematicians to prove convergence. This algorithm is credited with kick-starting the excitement in RL.
SARSA was developed shortly after Q-learning to provide a more general solution to TD learning. The main difference from Q-learning is the lack of argmax in the delta. Instead it calculates the expected return by averaging over all runs (in an online manner).
Two fundamental RL algorithms, both remarkably useful, even today. One of the primary reasons for their popularity is that they are simple, because by default they only work with discrete state and action spaces. Of course it is possible to improve them to work with continuous state/action spaces, but consider discretizing to keep things rediculously simple.
Setup¶
!pip install pygame==1.9.6 pandas==1.0.5 matplotlib==3.2.1
!pip install --upgrade git+git://github.com/david-abel/simple_rl.git@77c0d6b910efbe8bdd5f4f87337c5bc4aed0d79c > /dev/null
import numpy as np
import pandas as pd
import math
import json
import os
from collections import defaultdict
# Other imports.
from simple_rl.agents import Agent, QLearningAgent, RandomAgent
from simple_rl.agents import DoubleQAgent, DelayedQAgent
from simple_rl.tasks import GridWorldMDP
from simple_rl.run_experiments import run_single_agent_on_mdp
import matplotlib
import matplotlib.pyplot as plt
from matplotlib.ticker import ScalarFormatter, AutoMinorLocator
matplotlib.use("agg", force=True)
%matplotlib inline
SARSA agent¶
class SARSAAgent(QLearningAgent):
def __init__(self, actions, goal_reward, name="SARSA",
alpha=0.1, gamma=0.99, epsilon=0.1, explore="uniform", anneal=False):
self.goal_reward = goal_reward
QLearningAgent.__init__(
self,
actions=list(actions),
name=name,
alpha=alpha,
gamma=gamma,
epsilon=epsilon,
explore=explore,
anneal=anneal)
def policy(self, state):
return self.get_max_q_action(state)
def act(self, state, reward, learning=True):
'''
This is mostly the same as the base QLearningAgent class. Except that
the update procedure now generates the action.
'''
if learning:
action = self.update(
self.prev_state, self.prev_action, reward, state)
else:
if self.explore == "softmax":
# Softmax exploration
action = self.soft_max_policy(state)
else:
# Uniform exploration
action = self.epsilon_greedy_q_policy(state)
self.prev_state = state
self.prev_action = action
self.step_number += 1
# Anneal params.
if learning and self.anneal:
self._anneal()
return action
def update(self, state, action, reward, next_state):
'''
Args:
state (State)
action (str)
reward (float)
next_state (State)
Summary:
Updates the internal Q Function according to the Bellman Equation
using a SARSA update
'''
if self.explore == "softmax":
# Softmax exploration
next_action = self.soft_max_policy(next_state)
else:
# Uniform exploration
next_action = self.epsilon_greedy_q_policy(next_state)
# Update the Q Function.
prev_q_val = self.get_q_value(state, action)
next_q_val = self.get_q_value(next_state, next_action)
self.q_func[state][action] = prev_q_val + self.alpha * \
(reward + self.gamma * next_q_val - prev_q_val)
return next_action
Experiment¶
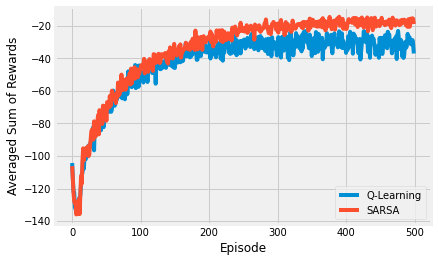
Basically I’m training an agent for a maximum of 100 steps, for 500 episodes, averaging over 100 repeats.
Feel free to tinker with the settimgs.
np.random.seed(42)
instances = 100
n_episodes = 500
alpha = 0.1
epsilon = 0.1
# Setup MDP, Agents.
mdp = GridWorldMDP(
width=10, height=4, init_loc=(1, 1), goal_locs=[(10, 1)],
lava_locs=[(x, 1) for x in range(2, 10)], is_lava_terminal=True, gamma=1.0, walls=[], slip_prob=0.0, step_cost=1.0, lava_cost=100.0)
print("Q-Learning")
rewards = np.zeros((n_episodes, instances))
for instance in range(instances):
ql_agent = QLearningAgent(
mdp.get_actions(),
epsilon=epsilon,
alpha=alpha)
# mdp.visualize_learning(ql_agent, delay=0.0001)
print(" Instance " + str(instance) + " of " + str(instances) + ".")
terminal, num_steps, reward = run_single_agent_on_mdp(
ql_agent, mdp, episodes=n_episodes, steps=100)
rewards[:, instance] = reward
df = pd.DataFrame(rewards.mean(axis=1))
df.to_json("q_learning_cliff_rewards.json")
print("SARSA")
rewards = np.zeros((n_episodes, instances))
for instance in range(instances):
sarsa_agent = SARSAAgent(
mdp.get_actions(),
goal_reward=0,
epsilon=epsilon,
alpha=alpha)
# mdp.visualize_learning(sarsa_agent, delay=0.0001)
print(" Instance " + str(instance) + " of " + str(instances) + ".")
terminal, num_steps, reward = run_single_agent_on_mdp(
sarsa_agent, mdp, episodes=n_episodes, steps=100)
rewards[:, instance] = reward
df = pd.DataFrame(rewards.mean(axis=1))
df.to_json("sarsa_cliff_rewards.json")
Q-Learning
Instance 0 of 100.
Instance 1 of 100.
Instance 2 of 100.
Instance 3 of 100.
Instance 4 of 100.
Instance 5 of 100.
Instance 6 of 100.
Instance 7 of 100.
Instance 8 of 100.
Instance 9 of 100.
Instance 10 of 100.
Instance 11 of 100.
Instance 12 of 100.
Instance 13 of 100.
Instance 14 of 100.
Instance 15 of 100.
Instance 16 of 100.
Instance 17 of 100.
Instance 18 of 100.
Instance 19 of 100.
Instance 20 of 100.
Instance 21 of 100.
Instance 22 of 100.
Instance 23 of 100.
Instance 24 of 100.
Instance 25 of 100.
Instance 26 of 100.
Instance 27 of 100.
Instance 28 of 100.
Instance 29 of 100.
Instance 30 of 100.
Instance 31 of 100.
Instance 32 of 100.
Instance 33 of 100.
Instance 34 of 100.
Instance 35 of 100.
Instance 36 of 100.
Instance 37 of 100.
Instance 38 of 100.
Instance 39 of 100.
Instance 40 of 100.
Instance 41 of 100.
Instance 42 of 100.
Instance 43 of 100.
Instance 44 of 100.
Instance 45 of 100.
Instance 46 of 100.
Instance 47 of 100.
Instance 48 of 100.
Instance 49 of 100.
Instance 50 of 100.
Instance 51 of 100.
Instance 52 of 100.
Instance 53 of 100.
Instance 54 of 100.
Instance 55 of 100.
Instance 56 of 100.
Instance 57 of 100.
Instance 58 of 100.
Instance 59 of 100.
Instance 60 of 100.
Instance 61 of 100.
Instance 62 of 100.
Instance 63 of 100.
Instance 64 of 100.
Instance 65 of 100.
Instance 66 of 100.
Instance 67 of 100.
Instance 68 of 100.
Instance 69 of 100.
Instance 70 of 100.
Instance 71 of 100.
Instance 72 of 100.
Instance 73 of 100.
Instance 74 of 100.
Instance 75 of 100.
Instance 76 of 100.
Instance 77 of 100.
Instance 78 of 100.
Instance 79 of 100.
Instance 80 of 100.
Instance 81 of 100.
Instance 82 of 100.
Instance 83 of 100.
Instance 84 of 100.
Instance 85 of 100.
Instance 86 of 100.
Instance 87 of 100.
Instance 88 of 100.
Instance 89 of 100.
Instance 90 of 100.
Instance 91 of 100.
Instance 92 of 100.
Instance 93 of 100.
Instance 94 of 100.
Instance 95 of 100.
Instance 96 of 100.
Instance 97 of 100.
Instance 98 of 100.
Instance 99 of 100.
SARSA
Instance 0 of 100.
Instance 1 of 100.
Instance 2 of 100.
Instance 3 of 100.
Instance 4 of 100.
Instance 5 of 100.
Instance 6 of 100.
Instance 7 of 100.
Instance 8 of 100.
Instance 9 of 100.
Instance 10 of 100.
Instance 11 of 100.
Instance 12 of 100.
Instance 13 of 100.
Instance 14 of 100.
Instance 15 of 100.
Instance 16 of 100.
Instance 17 of 100.
Instance 18 of 100.
Instance 19 of 100.
Instance 20 of 100.
Instance 21 of 100.
Instance 22 of 100.
Instance 23 of 100.
Instance 24 of 100.
Instance 25 of 100.
Instance 26 of 100.
Instance 27 of 100.
Instance 28 of 100.
Instance 29 of 100.
Instance 30 of 100.
Instance 31 of 100.
Instance 32 of 100.
Instance 33 of 100.
Instance 34 of 100.
Instance 35 of 100.
Instance 36 of 100.
Instance 37 of 100.
Instance 38 of 100.
Instance 39 of 100.
Instance 40 of 100.
Instance 41 of 100.
Instance 42 of 100.
Instance 43 of 100.
Instance 44 of 100.
Instance 45 of 100.
Instance 46 of 100.
Instance 47 of 100.
Instance 48 of 100.
Instance 49 of 100.
Instance 50 of 100.
Instance 51 of 100.
Instance 52 of 100.
Instance 53 of 100.
Instance 54 of 100.
Instance 55 of 100.
Instance 56 of 100.
Instance 57 of 100.
Instance 58 of 100.
Instance 59 of 100.
Instance 60 of 100.
Instance 61 of 100.
Instance 62 of 100.
Instance 63 of 100.
Instance 64 of 100.
Instance 65 of 100.
Instance 66 of 100.
Instance 67 of 100.
Instance 68 of 100.
Instance 69 of 100.
Instance 70 of 100.
Instance 71 of 100.
Instance 72 of 100.
Instance 73 of 100.
Instance 74 of 100.
Instance 75 of 100.
Instance 76 of 100.
Instance 77 of 100.
Instance 78 of 100.
Instance 79 of 100.
Instance 80 of 100.
Instance 81 of 100.
Instance 82 of 100.
Instance 83 of 100.
Instance 84 of 100.
Instance 85 of 100.
Instance 86 of 100.
Instance 87 of 100.
Instance 88 of 100.
Instance 89 of 100.
Instance 90 of 100.
Instance 91 of 100.
Instance 92 of 100.
Instance 93 of 100.
Instance 94 of 100.
Instance 95 of 100.
Instance 96 of 100.
Instance 97 of 100.
Instance 98 of 100.
Instance 99 of 100.
Results¶
Now you can plot the results for each of the agents.
data_files = [("Q-Learning", "q_learning_cliff_rewards.json"),
("SARSA", "sarsa_cliff_rewards.json")]
fig, ax = plt.subplots()
for j, (name, data_file) in enumerate(data_files):
df = pd.read_json(data_file)
x = range(len(df))
y = df.sort_index().values
ax.plot(x,
y,
linestyle='solid',
label=name)
ax.set_xlabel('Episode')
ax.set_ylabel('Averaged Sum of Rewards')
ax.legend(loc='lower right')
plt.show()
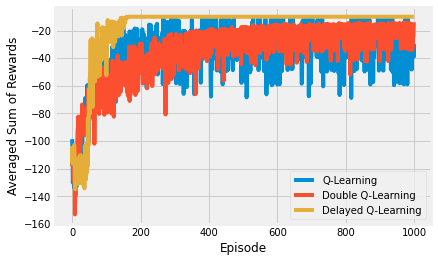
Delayed Q-learning vs. Double Q-learning vs. Q-Learning¶
Delayed Q-learning and double Q-learning are two extensions to Q-learning that are used throughout RL, so it’s worth considering them in a simple form. Delayed Q-learning simply delays any estimate until there is a statistically significant sample of observations. Slowing update with an exponentially weighted moving average is a similar strategy. Double Q-learning includes two Q-tables, in essence two value estimates, to reduce bias.
np.random.seed(42)
instances = 10
n_episodes = 1000
alpha = 0.1
epsilon = 0.1
# Setup MDP, Agents.
mdp = GridWorldMDP(
width=10, height=4, init_loc=(1, 1), goal_locs=[(10, 1)],
lava_locs=[(x, 1) for x in range(2, 10)], is_lava_terminal=True, gamma=1.0, walls=[], slip_prob=0.0, step_cost=1.0, lava_cost=100.0)
print("Q-Learning")
rewards = np.zeros((n_episodes, instances))
for instance in range(instances):
ql_agent = QLearningAgent(
mdp.get_actions(),
epsilon=epsilon,
alpha=alpha)
print(" Instance " + str(instance) + " of " + str(instances) + ".")
terminal, num_steps, reward = run_single_agent_on_mdp(
ql_agent, mdp, episodes=n_episodes, steps=100)
rewards[:, instance] = reward
df = pd.DataFrame(rewards.mean(axis=1))
df.to_json("q_learning_cliff_rewards.json")
print("Double-Q-Learning")
rewards = np.zeros((n_episodes, instances))
for instance in range(instances):
ql_agent = DoubleQAgent(
mdp.get_actions(),
epsilon=epsilon,
alpha=alpha)
# mdp.visualize_learning(ql_agent, delay=0.0001)
print(" Instance " + str(instance) + " of " + str(instances) + ".")
terminal, num_steps, reward = run_single_agent_on_mdp(
ql_agent, mdp, episodes=n_episodes, steps=100)
rewards[:, instance] = reward
df = pd.DataFrame(rewards.mean(axis=1))
df.to_json("double_q_learning_cliff_rewards.json")
print("Delayed-Q-Learning")
rewards = np.zeros((n_episodes, instances))
for instance in range(instances):
ql_agent = DelayedQAgent(
mdp.get_actions(),
epsilon1=alpha)
# mdp.visualize_learning(ql_agent, delay=0.0001)
print(" Instance " + str(instance) + " of " + str(instances) + ".")
terminal, num_steps, reward = run_single_agent_on_mdp(
ql_agent, mdp, episodes=n_episodes, steps=100)
rewards[:, instance] = reward
df = pd.DataFrame(rewards.mean(axis=1))
df.to_json("delayed_q_learning_cliff_rewards.json")
Q-Learning
Instance 0 of 10.
Instance 1 of 10.
Instance 2 of 10.
Instance 3 of 10.
Instance 4 of 10.
Instance 5 of 10.
Instance 6 of 10.
Instance 7 of 10.
Instance 8 of 10.
Instance 9 of 10.
Double-Q-Learning
Instance 0 of 10.
Instance 1 of 10.
Instance 2 of 10.
Instance 3 of 10.
Instance 4 of 10.
Instance 5 of 10.
Instance 6 of 10.
Instance 7 of 10.
Instance 8 of 10.
Instance 9 of 10.
Delayed-Q-Learning
Instance 0 of 10.
Instance 1 of 10.
Instance 2 of 10.
Instance 3 of 10.
Instance 4 of 10.
Instance 5 of 10.
Instance 6 of 10.
Instance 7 of 10.
Instance 8 of 10.
Instance 9 of 10.
Below is the code to visualise the training of the three agents. As usual, there are a maximum of 100 steps, over 200 episodes, averaged over 10 repeats. Feel free to tinker with those settings.
The results show the differences between the three algorithms. In general, double Q-learning tends to be more stable than Q-learning. And delayed Q-learning is more robust against outliers, but can be problematic in environments with larger state/action spaces. I.e. you might have to wait for a long time to get the required number of samples for a particular state-action pair, which will delay further exploration.
data_files = [("Q-Learning", "q_learning_cliff_rewards.json"),
("Double Q-Learning", "double_q_learning_cliff_rewards.json"),
("Delayed Q-Learning", "delayed_q_learning_cliff_rewards.json")]
fig, ax = plt.subplots()
for j, (name, data_file) in enumerate(data_files):
df = pd.read_json(data_file)
x = range(len(df))
y = df.sort_index().values
ax.plot(x,
y,
linestyle='solid',
label=name)
ax.set_xlabel('Episode')
ax.set_ylabel('Averaged Sum of Rewards')
ax.legend(loc='lower right')
plt.show()