Adaptive Estimator Selection for Off-Policy Evaluation¶
Imports¶
import numpy as np
import pandas as pd
import matplotlib.pyplot as plt
import json
import copy
import argparse
import sys
import os
import random
import torch
import torch.nn as nn
import torch.optim as optim
from sklearn.tree import DecisionTreeRegressor
from sklearn.ensemble import RandomForestRegressor
torch.set_default_tensor_type(torch.DoubleTensor)
Params¶
# hs = [0.25,0.03125]
hs = [x for x in np.logspace(1, 7, num=7, base=0.5)]
# hs = [x for x in np.linspace(0.01, 0.5, 20)]
hs.reverse()
#hs = [0.02, 0.05, 0.1, 0.15, 0.2, 0.3, 0.4, 0.5]
FRIENDLY = {'method': 'friendly', 'alpha': 0.7, 'beta': 0.2, 'l': 10}
ADVERSARIAL = {'method': 'adversarial', 'alpha': 0.3, 'beta': 0.2, 'l': 10}
NEUTRAL = {'method': 'neutral', 'alpha': 0., 'beta': 0., 'l': 10}
ns = [10, 30, 100, 300, 1000, 3000]
Replicates = 100
feat_dim=10
act_dim=2
lip=10
CCB Env¶
class NNPredictor(object):
class NNModel(nn.Module):
def __init__(self,input_dim,output_dim):
super(NNPredictor.NNModel,self).__init__()
self.network = nn.Sequential(nn.Linear(input_dim,output_dim,bias=False),
nn.Sigmoid())
def forward(self,x):
return (self.network(x))
def __init__(self, input_dim, output_dim):
self.model = NNPredictor.NNModel(input_dim, output_dim)
self.criterion = nn.MSELoss()
def fit(self, X, y):
optimizer = optim.Adagrad(self.model.parameters(), lr = 0.1)
prev_loss = 0.0
for i in range(5000):
total_loss = 0.0
for a in range(y.shape[1]):
optimizer.zero_grad()
preds = self.model(torch.tensor(X))
loss = self.criterion(preds[:,a], torch.tensor(y[:,a]))
total_loss += loss
loss.backward()
optimizer.step()
if np.mod(i,100) == 0:
x = total_loss.detach().numpy()
if np.round(x,3) == np.round(prev_loss,3):
break
prev_loss = x
def predict(self, x):
return self.model(torch.tensor(x)).detach().numpy()
class CCBPolicy(object):
def __init__(self,act_dim,model=None):
self.model=model
self.act_dim=act_dim
def friendly_soften(self, action, soften_params):
alpha = soften_params['alpha']
beta = soften_params['beta']
n_bins = soften_params['l']
soft_action = []
probs = []
for act in action[0]:
bin_id = np.ceil(act * n_bins)
tau_low = (bin_id-1.)/n_bins
tau_high = bin_id*1./n_bins
u = np.random.uniform(-0.5, 0.5)
explore_prob = alpha+beta*u
if np.random.uniform(0,1) > explore_prob:
bin_id = np.random.choice(list(set(np.arange(1,n_bins+1))-set([bin_id])))
chosen_act = np.random.uniform((bin_id-1.)/n_bins,bin_id*1./n_bins)
soft_action.append(chosen_act)
rho_o = ((1 - explore_prob) * (n_bins/(n_bins - 1)))
rho_i = (explore_prob * n_bins)
prob_data = {'tau_low': tau_low, 'tau_high': tau_high, 'rho_o': rho_o, 'rho_i': rho_i}
probs.append(prob_data)
return soft_action, probs
def adversarial_soften(self, action, soften_params):
alpha = soften_params['alpha']
beta = soften_params['beta']
n_bins = soften_params['l']
soft_action = []
probs = []
for act in action[0]:
"""
1. tau_low and tau_high are the lower and upper bounds of the bin in
which the unsoftened action falls.
2. rho_o is the density outside (tau_low, tau_high) after softening
and rho_i is the density inside (tau_low, tau_high) after softening
"""
bin_id = np.ceil(act * n_bins)
tau_low = (bin_id-1.)/n_bins
tau_high = bin_id*1./n_bins
u = np.random.uniform(-0.5, 0.5)
explore_prob = alpha+beta*u
if np.random.uniform(0,1) < alpha+beta*u:
bin_id = np.random.choice(list(set(np.arange(1,n_bins+1))-set([bin_id])))
else:
bin_id = np.random.choice(list(set(np.arange(1,n_bins+1))))
chosen_act = np.random.uniform((bin_id-1.)/n_bins, bin_id*1./n_bins)
soft_action.append(chosen_act)
rho_o = (explore_prob * (n_bins/(n_bins - 1))) + (1-explore_prob)
rho_i = (1 - explore_prob)
prob_data = {'tau_low': tau_low, 'tau_high': tau_high, 'rho_o': rho_o, 'rho_i': rho_i}
probs.append(prob_data)
return soft_action, probs
def neutral_soften(self, action, soften_params):
soft_action = np.random.uniform(0,1,[1,self.act_dim])[0]
probs = []
for i in range(self.act_dim):
prob_data = {'tau_low': 0, 'tau_high': 1, 'rho_o': 0, 'rho_i': 1}
probs.append(prob_data)
return soft_action, probs
def get_soften_action(self, action, soften_params):
if soften_params != None:
soft_action = []
if soften_params['method'] == "friendly":
soft_action, probs = self.friendly_soften(action, soften_params)
elif soften_params['method'] == "adversarial":
soft_action, probs = self.adversarial_soften(action, soften_params)
elif soften_params['method'] == "neutral":
soft_action, probs = self.neutral_soften(action, soften_params)
return {"action": [soft_action], "prob": probs}
else:
probs = []
for i in range(self.act_dim):
prob_data = {'tau_low': 0, 'tau_high': 1, 'rho_o': 0, 'rho_i': 1}
probs.append(prob_data)
return {"action": action, "prob": probs}
def get_action(self, x, soften=None):
if soften == "friendly":
soften_params = FRIENDLY
elif soften == "adversarial":
soften_params = ADVERSARIAL
elif soften == "neutral":
soften_params = NEUTRAL
else:
soften_params = None
if self.model is None:
act = np.random.uniform(0,1,[1,self.act_dim])
else:
if self.act_dim == 1:
act = self.model.predict(x).reshape(-1,1)
else:
act = self.model.predict(x)
act = torch.clamp(torch.Tensor(act),0,1).detach().numpy()
act_prob = self.get_soften_action(act, soften_params)
return act_prob
class CCBSimulatedEnv(object):
def __init__(self, lip=1, feat_dim=5, act_dim = 1, target_model_name = "NNPredictor", logging_model_name = None, loss_type="triangular", soften=None):
self.feat_dim=feat_dim
self.act_dim=act_dim
self.logging_model = self.get_model(logging_model_name)
self.target_model = self.get_model(target_model_name)
self.lip=lip
self.opt=np.random.normal(0,1,(self.feat_dim,self.act_dim))
self.loss_type = loss_type
self.soften=soften
def get_model(self, model_name):
if model_name == "NNPredictor":
return NNPredictor(self.feat_dim,self.act_dim)
elif model_name == "Tree":
#return DecisionTreeRegressor(max_depth=5, min_samples_split = 5, min_samples_leaf = 5)
return RandomForestRegressor(random_state=1, n_estimators=10, min_samples_split=5)
else:
return None
def train_logger(self, n=0, sig=0.5):
"""
Uniform logging policy for now
"""
if self.soften:
if self.logging_model != None:
X = np.zeros((n, self.feat_dim))
Y = np.zeros((n, self.act_dim))
for i in range(n):
x = self.context()
X[i,:] = x
Y[i,:]= self.get_center(x) + np.random.normal(0,sig,(1,self.act_dim))
self.logging_model.fit(X,Y)
else:
raise ValueError("soften without model?!! can't do!!!")
self.logger = CCBPolicy(self.act_dim, model = self.logging_model)
else:
self.logger = CCBPolicy(self.act_dim)
def train_target(self, n,sig=0.5):
"""
Good target policy trained via logistic regression (effectively)
"""
X = np.zeros((n, self.feat_dim))
Y = np.zeros((n, self.act_dim))
for i in range(n):
x = self.context()
X[i,:] = x
Y[i,:]= self.get_center(x) + np.random.normal(0,sig,(1,self.act_dim))
self.target_model.fit(X,Y)
self.target = CCBPolicy(self.act_dim,model=self.target_model)
def ground_truth(self,n):
'''
if self.soften == "friendly":
soften_params = FRIENDLY
elif self.soften == "adversarial":
soften_params = ADVERSARIAL
elif self.soften == "neutral":
soften_params = NEUTRAL
else:
soften_params = None'''
soften_params = None
l = 0
for i in range(n):
x = self.context()
a = self.target.get_action(x,soften_params)['action']
l += self.loss(x,a)
return(l/n)
def get_center(self,x):
return np.exp(np.dot(x,self.opt))/(1+np.exp(np.dot(x,self.opt)))
def loss(self, x, a):
center = self.get_center(x)
if self.loss_type == "triangular":
loss = min(np.sum(self.lip*np.abs(a - center)),1)
elif self.loss_type == "parabolic":
loss = min(np.sum((self.lip**2/4)*np.abs(a-center)),1)
else:
loss = 1.
return loss
def context(self):
x = np.random.normal(0,1,[1,self.feat_dim])
return(x)
def gen_logging_data(self,n):
"""
@akshay: only supports uniform logging for now
"""
data = []
for i in range(n):
x = self.context()
act_prob = self.logger.get_action(x, self.soften)
a = act_prob["action"]
p = act_prob["prob"]
#print("prob: ", p)
l = self.loss(x,a)
data.append((x,a,l,p))
return (data)
Env = CCBSimulatedEnv(lip=3,act_dim=2)
Env.train_logger()
Env.train_target(100)
print("Ground truth loss: %0.2f" % (Env.ground_truth(1000)))
data = Env.gen_logging_data(10000)
print("Uniform exploration average loss: %0.2f" % (np.mean([tup[2] for tup in data])))
Ground truth loss: 0.55
Uniform exploration average loss: 0.94
"""
Env = CCBSimulatedEnv(lip=3, act_dim=2, target_model_name = "NNPredictor", logging_model_name = "NNPredictor")
Env.train_logger(10000)
Env.train_target(3000)
soften_target_params = None
soften_logging_params = {'method': 'friendly', 'alpha': 0.7, 'beta': 0.2, 'l': 10}
print("Ground truth loss: %0.2f" % (Env.ground_truth(100000, soften_target_params)))
data = Env.gen_logging_data(1000, soften_logging_params)
print("Uniform exploration average loss: %0.2f" % (np.mean([tup[2] for tup in data])))
"""
#import SmoothEval
#print("Off policy estimate: %0.2f" % (SmoothEval.smooth_eval(Env.target, data, 0.1)))
Estimators¶
class Estimator(object):
def __init__(self,params=None):
self.params=params
def estimate(self,target,data):
return 0
def variance(self,target,data):
return 0
class SmoothedEstimator(Estimator):
def __init__(self,h, soften=False, kernel = None):
super(Estimator).__init__()
self.h = h
self.soften = soften
self.kernel = kernel
def epanechnikov_kernel(self, u):
return 0.75*(1-u**2)*(1 if abs(u) <= 1 else 0)
def epanechnikov_int(self,lo,hi):
'''
:return: Definite integral of the kernel from between lo and hi. Assumes that they are within bounds.
'''
return 0.75*(hi-hi**3/3.0) - 0.75*(lo-lo**3/3.0)
def boxcar_kernel(self, u):
return 0.5*(1 if abs(u) <= 1 else 0)
def boxcar_int(self,lo,hi):
'''
:return: Definite integral of the kernel from between lo and hi. Assumes that they are within bounds.
'''
return abs(hi -lo)/2.
def get_density(self,a,p):
if a >= p['tau_low'] and a <= p['tau_high']:
return p['rho_i']
else:
return p['rho_o']
def estimate(self,target,data):
val = 0
rewards = []
for tup in data:
(x,a,l,p) = tup
target_action = target.get_action(x)['action']
if self.kernel == None:
# boundary bias not handled here, experiment at your own risk
if np.all(np.abs(a - target_action) <= self.h):
val += l/self.get_prob(target_action, p)
elif self.kernel == "epanechnikov":
den = 1.
num = l
for d in range(target_action.shape[1]):
delta = (a[0][d] - target_action[0,d])/self.h
num *= self.epanechnikov_kernel(delta)
t_lo = max(target_action[0,d]-self.h, -1)
t_hi = min(target_action[0,d]+self.h, 1)
lo = (t_lo - target_action[0,d])/self.h
hi = (t_hi - target_action[0,d])/self.h
den *= self.get_density(target_action[0,d],p[d]) * self.h * self.epanechnikov_int(lo, hi)
val += num/den
rewards.append(num/den)
elif self.kernel == "boxcar":
den = 1.
num = l
for d in range(target_action.shape[1]):
delta = (a[0][d] - target_action[0,d])/self.h
num *= self.boxcar_kernel(delta)
t_lo = max(target_action[0,d]-self.h, -1)
t_hi = min(target_action[0,d]+self.h, 1)
lo = (t_lo - target_action[0,d])/self.h
hi = (t_hi - target_action[0,d])/self.h
den *= self.get_density(target_action[0,d],p[d]) * self.boxcar_int(lo,hi) * self.h
val += num/den
rewards.append(num/den)
#print("losses ", losses)
return val/len(data)#, rewards
def interval_overlap(self,sa_l, sa_h, b_l, b_h):
'''
Returns how much the interval (sa_l, sa_h) overlaps the interval (b_l, b_h)
'''
return max(min(sa_h,b_h)-max(sa_l, b_l), 0)
def get_prob(self,a,p):
if self.soften:
prob = 1.
for d in range(a.shape[1]):
part1 = p[d]['rho_o'] * self.interval_overlap(a[0,d]-self.h, a[0,d]+self.h,0, p[d]['tau_low'])
part2 = p[d]['rho_i'] * self.interval_overlap(a[0,d]-self.h, a[0,d]+self.h, p[d]['tau_low'], p[d]['tau_high'])
part3 = p[d]['rho_o'] * self.interval_overlap(a[0,d]-self.h, a[0,d]+self.h, p[d]['tau_high'], 1)
prob *= part1 + part2 + part3
return prob
else:
"""
Get uniform density for the box of length h around a.
This is complicated due to edge effects
"""
total = 1
for d in range(a.shape[1]):
total *= min(a[0,d]+self.h,1)-max(a[0,d]-self.h,0)
return total
def variance(self,target,data):
mean = 0
zs = []
for tup in data:
(x,a,l,p) = tup
target_action = target.get_action(x)['action']
tmp = 0
if self.kernel == None and np.all(np.abs(a - target_action) <= self.h):
# boundary biasnot handled here, experiment at your own risk
tmp = l/self.get_prob(target_action, p)
elif self.kernel == "epanechnikov":
den = 1.
num = l
for d in range(target_action.shape[1]):
delta = (a[0][d] - target_action[0,d])/self.h
num *= self.epanechnikov_kernel(delta)
t_lo = max(target_action[0,d]-self.h, -1)
t_hi = min(target_action[0,d]+self.h, 1)
lo = (t_lo - target_action[0,d])/self.h
hi = (t_hi - target_action[0,d])/self.h
den *= self.get_density(target_action[0,d],p[d]) * self.h * self.epanechnikov_int(lo, hi)
tmp += num/den
elif self.kernel == "boxcar":
den = 1.
num = l
for d in range(target_action.shape[1]):
delta = (a[0][d] - target_action[0,d])/self.h
num *= self.boxcar_kernel(delta)
t_lo = max(target_action[0,d]-self.h, -1)
t_hi = min(target_action[0,d]+self.h, 1)
lo = (t_lo - target_action[0,d])/self.h
hi = (t_hi - target_action[0,d])/self.h
den *= self.get_density(target_action[0,d],p[d]) * self.boxcar_int(lo,hi) * self.h
tmp += num/den
mean += tmp
zs.append(tmp)
mean = mean/len(data)
return(np.mean([(z-mean)**2 for z in zs])/(len(zs)-1))
SLOPE¶
class Slope(Estimator):
"""
The assumption is that hyperparams is a sequence for which
variance is decreasing.
"""
def __init__(self,params=None):
if params is None:
raise Exception("Slope requires two parameters")
self.estimator = None
self.hyperparams = None
if 'estimator' in params.keys():
self.estimator = params['estimator']
if 'hyperparams' in params.keys():
self.hyperparams = params['hyperparams']
if 'soften' in params.keys():
self.soften = params['soften']
if 'kernel' in params.keys():
self.kernel = params['kernel']
if self.estimator is None or self.hyperparams is None:
raise Exception("Slope requires base estimator and set of hyperparameters")
self.plot = False
if 'plot' in params.keys():
self.plot=True
def estimate(self,target,data):
means = []
widths = []
for h in self.hyperparams: # assumption: hs are ordered ascending
E = self.estimator(h, self.soften, self.kernel)
mean = E.estimate(target,data)
means.append(mean)
var = E.variance(target,data)
widths.append(np.sqrt(var))
intervals = []
for i in range(len(self.hyperparams)):
if i < len(self.hyperparams)-1:
width = max(widths[i], max(widths[i+1:]))
else:
width = widths[i]
intervals.append((means[i] - 2*width, means[i] + 2*width))
print("[Slope] h = %0.2f, mean = %0.2f, low = %0.2f, high = %0.2f" % (self.hyperparams[i], means[i], intervals[-1][0], intervals[-1][1]), flush=True)
index = 0
curr = [intervals[0][0], intervals[0][1]]
for i in range(len(intervals)):
if intervals[i][0] > curr[1] or intervals[i][1] < curr[0]:
### Current interval is not overlapping with previous ones, return previous index
break
else:
### Take intersection
curr[0] = max(curr[0], intervals[i][0])
curr[1] = min(curr[1], intervals[i][1])
index = i
print("[Slope] curr_low = %0.2f, curr_high = %0.2f" % (curr[0], curr[1]))
print("[Slope] returning index %d" % (index), flush=True)
self.means = means
self.intervals = intervals
self.index = index
return means[index]
Env = CCBSimulatedEnv(lip=5,act_dim=1)
Env.train_logger()
Env.train_target(100)
hs = np.logspace(-8,0,9,base=2)
print(hs)
n = 1000
data = Env.gen_logging_data(n)
estimator = Slope(params={'estimator':SmoothedEstimator,'hyperparams': hs,
'soften':'friendly', 'kernel':'boxcar'})
estimator.estimate(Env.target, data)
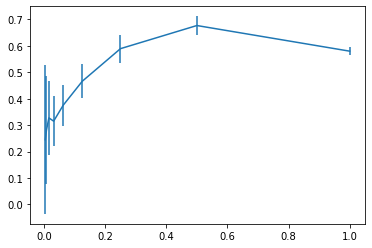
print([estimator.intervals[i][1] - estimator.intervals[i][0] for i in range(len(hs))], flush=True)
errors = np.zeros((2,len(hs)))
errors[0,:] = [estimator.means[i] - estimator.intervals[i][0] for i in range(len(hs))]
errors[1,:] = [estimator.intervals[i][1]-estimator.means[i] for i in range(len(hs))]
plt.errorbar(hs, estimator.means, errors)
plt.show()
[0.00390625 0.0078125 0.015625 0.03125 0.0625 0.125
0.25 0.5 1. ]
[Slope] h = 0.00, mean = 0.25, low = -0.04, high = 0.53
[Slope] h = 0.01, mean = 0.28, low = 0.08, high = 0.48
[Slope] h = 0.02, mean = 0.33, low = 0.19, high = 0.47
[Slope] h = 0.03, mean = 0.32, low = 0.22, high = 0.41
[Slope] h = 0.06, mean = 0.38, low = 0.30, high = 0.45
[Slope] h = 0.12, mean = 0.47, low = 0.40, high = 0.53
[Slope] h = 0.25, mean = 0.59, low = 0.54, high = 0.64
[Slope] h = 0.50, mean = 0.68, low = 0.64, high = 0.71
[Slope] h = 1.00, mean = 0.58, low = 0.56, high = 0.60
[Slope] curr_low = -0.04, curr_high = 0.53
[Slope] curr_low = 0.08, curr_high = 0.48
[Slope] curr_low = 0.19, curr_high = 0.47
[Slope] curr_low = 0.22, curr_high = 0.41
[Slope] curr_low = 0.30, curr_high = 0.41
[Slope] curr_low = 0.40, curr_high = 0.41
[Slope] returning index 5
[0.5614697143179493, 0.4058911936714811, 0.27863378956499896, 0.1902802142473463, 0.15564567751178704, 0.1286471679836968, 0.106658862699472, 0.07029282184273722, 0.03174689855369506]
def parse_args():
parser=argparse.ArgumentParser(description='Continuous CB Simulations')
parser.add_argument('--seed', type=int, default=577, metavar='N',
help='random seed (default: 577)')
parser.add_argument('--start_iter', type=int, default=1,
help='Which replicate number to start at')
parser.add_argument('--total_iter', type=int, default=5,
help='Number of iterations')
parser.add_argument('--feat_dim', type=int, default=5,
help='Dimensionality of feature space')
parser.add_argument('--act_dim', type=int, default=1,
help='Dimensionality of action space')
parser.add_argument('--lip', type=float, default=10,
help='Lipschitz constant for losses')
parser.add_argument('--samples', type=int, default=100,
help='Number of samples')
parser.add_argument('--kernel', type=str, default=None,
help='kernel function to use for smoothing: boxcar or epanechnikov')
parser.add_argument('--soften', type=str, default=None,
help='stochastic tranformation for policy: freindly, adversarial, Neutral or None')
parser.add_argument('--loss', type=str, default='triangular',
help='specify loss function: triangular or parabolic')
parser.add_argument('--logging_model_name', type=str, default=None,
help='specify model type for logging policy: NNPredictor or Tree or None')
parser.add_argument('--target_model_name', type=str, default='NNPredictor',
help='specify model type for target policy: NNPredictor or Tree or None')
parser.add_argument('--command_num', type=int, default=0,
help='command line number from commands_list.txt')
parser.add_argument('--expt_name', type=str, default="slope-results",
help='results will be stored in a folder expt_name in azure storage')
args=parser.parse_args(args={})
return(args)
Args = parse_args()
print(Args, flush=True)
np.random.seed(Args.seed)
random.seed(Args.seed)
torch.manual_seed(Args.seed)
Env = CCBSimulatedEnv(lip=Args.lip,feat_dim=Args.feat_dim,act_dim=Args.act_dim, target_model_name=Args.target_model_name,logging_model_name=Args.logging_model_name, loss_type=Args.loss, soften = Args.soften)
Env.train_logger(10000)
Env.train_target(100)
ground_truth=Env.ground_truth(100000)
print("ground truth: ", ground_truth)
print("[Experiment] Bandwidths: %s" % (",".join([str(x) for x in hs])), flush=True)
for i in range(Args.start_iter, Args.start_iter+Args.total_iter):
np.random.seed(Args.seed+37*i)
random.seed(Args.seed+37*i)
print("generating logging data")
data = Env.gen_logging_data(Args.samples)
mses = []
mses_dict = {}
for h in hs:
#print("\nh ", h)
estimator = SmoothedEstimator(h, Args.soften, Args.kernel)
estimate = estimator.estimate(Env.target, data)
mses.append((estimate-ground_truth)**2)
mses_dict[h] = mses[-1]
estimator=Slope(params={'estimator': SmoothedEstimator, 'hyperparams': hs, 'soften': Args.soften, 'kernel':Args.kernel})
estimate = estimator.estimate(Env.target, data)
mses.append((estimate-ground_truth)**2)
mses_dict['slope'] = mses[-1]
print({k: v for k, v in sorted(mses_dict.items(), key=lambda item: item[1])}, flush=True)
f = open('./command_num=%s_replicate=%d.json' % (Args.command_num,i), 'w')
results = {}
for j in range(len(hs)):
results[hs[j]] = mses[j]
results['Slope'] = mses[-1]
results['index'] = estimator.index
results['command_num'] = Args.command_num
results['replicate'] = i
results['ground_truth'] = ground_truth
results['logging_model'] = Args.logging_model_name
results['target_model'] = Args.target_model_name
results['soften'] = Args.soften
results['kernel'] = Args.kernel
results['lip'] = Args.lip
results['samples'] = Args.samples
results['loss'] = Args.loss
f.write(json.dumps(results))
f.close()
Namespace(act_dim=1, command_num=0, expt_name='slope-results', feat_dim=5, kernel=None, lip=10, logging_model_name=None, loss='triangular', samples=100, seed=577, soften=None, start_iter=1, target_model_name='NNPredictor', total_iter=5)
ground truth: 0.5671172485946827
[Experiment] Bandwidths: 0.00390625,0.0078125,0.015625,0.03125,0.0625,0.125,0.25,0.5,1.0
generating logging data
[Slope] h = 0.00, mean = 2.22, low = -0.94, high = 5.39
[Slope] h = 0.01, mean = 1.11, low = -0.47, high = 2.69
[Slope] h = 0.02, mean = 0.56, low = -0.24, high = 1.35
[Slope] h = 0.03, mean = 0.54, low = 0.03, high = 1.06
[Slope] h = 0.06, mean = 0.69, low = 0.28, high = 1.10
[Slope] h = 0.12, mean = 0.68, low = 0.36, high = 0.99
[Slope] h = 0.25, mean = 0.74, low = 0.51, high = 0.98
[Slope] h = 0.50, mean = 0.75, low = 0.60, high = 0.91
[Slope] h = 1.00, mean = 0.89, low = 0.84, high = 0.94
[Slope] curr_low = -0.94, curr_high = 5.39
[Slope] curr_low = -0.47, curr_high = 2.69
[Slope] curr_low = -0.24, curr_high = 1.35
[Slope] curr_low = 0.03, curr_high = 1.06
[Slope] curr_low = 0.28, curr_high = 1.06
[Slope] curr_low = 0.36, curr_high = 0.99
[Slope] curr_low = 0.51, curr_high = 0.98
[Slope] curr_low = 0.60, curr_high = 0.91
[Slope] curr_low = 0.84, curr_high = 0.91
[Slope] returning index 8
{0.015625: 0.00013095939363468314, 0.03125: 0.000514313405202113, 0.125: 0.011998182457015729, 0.0625: 0.015013637721898761, 0.25: 0.030974383995642913, 0.5: 0.0347929041636019, 1.0: 0.10522769589853825, 'slope': 0.10522769589853825, 0.0078125: 0.2961860211984006, 0.00390625: 2.7409343730021356}
generating logging data
[Slope] h = 0.00, mean = 0.00, low = -1.28, high = 1.28
[Slope] h = 0.01, mean = 0.64, low = -0.64, high = 1.92
[Slope] h = 0.02, mean = 0.77, low = -0.17, high = 1.70
[Slope] h = 0.03, mean = 0.55, low = -0.01, high = 1.11
[Slope] h = 0.06, mean = 0.41, low = 0.07, high = 0.75
[Slope] h = 0.12, mean = 0.50, low = 0.24, high = 0.76
[Slope] h = 0.25, mean = 0.66, low = 0.44, high = 0.89
[Slope] h = 0.50, mean = 0.76, low = 0.60, high = 0.91
[Slope] h = 1.00, mean = 0.95, low = 0.92, high = 0.99
[Slope] curr_low = -1.28, curr_high = 1.28
[Slope] curr_low = -0.64, curr_high = 1.28
[Slope] curr_low = -0.17, curr_high = 1.28
[Slope] curr_low = -0.01, curr_high = 1.11
[Slope] curr_low = 0.07, curr_high = 0.75
[Slope] curr_low = 0.24, curr_high = 0.75
[Slope] curr_low = 0.44, curr_high = 0.75
[Slope] curr_low = 0.60, curr_high = 0.75
[Slope] returning index 7
{0.03125: 0.0003615802953336617, 0.125: 0.004836182394032767, 0.0078125: 0.0053118954524092815, 0.25: 0.009375573176801098, 0.0625: 0.024582905962178287, 0.5: 0.03646418340203113, 'slope': 0.03646418340203113, 0.015625: 0.03976604070261362, 1.0: 0.14753559139879488, 0.00390625: 0.3216219736536031}
generating logging data
[Slope] h = 0.00, mean = 0.00, low = -1.28, high = 1.28
[Slope] h = 0.01, mean = 0.64, low = -0.64, high = 1.92
[Slope] h = 0.02, mean = 0.64, low = -0.26, high = 1.54
[Slope] h = 0.03, mean = 0.65, low = 0.05, high = 1.26
[Slope] h = 0.06, mean = 1.03, low = 0.55, high = 1.51
[Slope] h = 0.12, mean = 0.98, low = 0.63, high = 1.33
[Slope] h = 0.25, mean = 0.85, low = 0.63, high = 1.08
[Slope] h = 0.50, mean = 0.81, low = 0.66, high = 0.95
[Slope] h = 1.00, mean = 0.91, low = 0.86, high = 0.95
[Slope] curr_low = -1.28, curr_high = 1.28
[Slope] curr_low = -0.64, curr_high = 1.28
[Slope] curr_low = -0.26, curr_high = 1.28
[Slope] curr_low = 0.05, curr_high = 1.26
[Slope] curr_low = 0.55, curr_high = 1.26
[Slope] curr_low = 0.63, curr_high = 1.26
[Slope] curr_low = 0.63, curr_high = 1.08
[Slope] curr_low = 0.66, curr_high = 0.95
[Slope] curr_low = 0.86, curr_high = 0.95
[Slope] returning index 8
{0.0078125: 0.0053118954524092815, 0.015625: 0.0053118954524092815, 0.03125: 0.0074437010536776834, 0.5: 0.05787883691061838, 0.25: 0.08029935589167382, 1.0: 0.11526784045324477, 'slope': 0.11526784045324477, 0.125: 0.16955712388432934, 0.0625: 0.21367298595181078, 0.00390625: 0.3216219736536031}
generating logging data
[Slope] h = 0.00, mean = 0.00, low = -0.48, high = 0.48
[Slope] h = 0.01, mean = 0.00, low = -0.48, high = 0.48
[Slope] h = 0.02, mean = 0.29, low = -0.19, high = 0.77
[Slope] h = 0.03, mean = 0.19, low = -0.09, high = 0.47
[Slope] h = 0.06, mean = 0.10, low = -0.18, high = 0.38
[Slope] h = 0.12, mean = 0.48, low = 0.20, high = 0.77
[Slope] h = 0.25, mean = 0.69, low = 0.43, high = 0.94
[Slope] h = 0.50, mean = 0.96, low = 0.79, high = 1.12
[Slope] h = 1.00, mean = 0.90, low = 0.86, high = 0.95
[Slope] curr_low = -0.48, curr_high = 0.48
[Slope] curr_low = -0.48, curr_high = 0.48
[Slope] curr_low = -0.19, curr_high = 0.48
[Slope] curr_low = -0.09, curr_high = 0.47
[Slope] curr_low = -0.09, curr_high = 0.38
[Slope] curr_low = 0.20, curr_high = 0.38
[Slope] returning index 5
{0.125: 0.0067708321286613134, 'slope': 0.0067708321286613134, 0.25: 0.014038984080709586, 0.015625: 0.07702210665889857, 1.0: 0.1130001532518636, 0.03125: 0.14253043238646174, 0.5: 0.15188074082925326, 0.0625: 0.21688290139461727, 0.00390625: 0.3216219736536031, 0.0078125: 0.3216219736536031}
generating logging data
[Slope] h = 0.00, mean = 1.55, low = -0.97, high = 4.07
[Slope] h = 0.01, mean = 0.77, low = -0.48, high = 2.03
[Slope] h = 0.02, mean = 0.39, low = -0.24, high = 1.02
[Slope] h = 0.03, mean = 0.40, low = -0.01, high = 0.82
[Slope] h = 0.06, mean = 0.60, low = 0.22, high = 0.99
[Slope] h = 0.12, mean = 0.70, low = 0.40, high = 1.01
[Slope] h = 0.25, mean = 0.81, low = 0.57, high = 1.05
[Slope] h = 0.50, mean = 0.85, low = 0.70, high = 1.01
[Slope] h = 1.00, mean = 0.89, low = 0.84, high = 0.94
[Slope] curr_low = -0.97, curr_high = 4.07
[Slope] curr_low = -0.48, curr_high = 2.03
[Slope] curr_low = -0.24, curr_high = 1.02
[Slope] curr_low = -0.01, curr_high = 0.82
[Slope] curr_low = 0.22, curr_high = 0.82
[Slope] curr_low = 0.40, curr_high = 0.82
[Slope] curr_low = 0.57, curr_high = 0.82
[Slope] curr_low = 0.70, curr_high = 0.82
[Slope] returning index 7
{0.0625: 0.001388184323038319, 0.125: 0.018561568778561095, 0.03125: 0.026705753650189963, 0.015625: 0.03234386814647565, 0.0078125: 0.0430268843826697, 0.25: 0.060158880349553814, 0.5: 0.08268841770419147, 'slope': 0.08268841770419147, 1.0: 0.1034655938994113, 0.00390625: 0.9642762820850225}
i = 0
f = open('commands.sh', 'w')
for logging_model_name in ["NNPredictor", "Tree"]:
for target_model_name in ["NNPredictor", "Tree"]:
for soften in ["friendly", "adversarial"]:
for kernel in ["boxcar"]:
for loss in ["triangular"]:
for lip in [0.1, 1, 10]:
for samples in [10,100,1000]:
f.write("python3 ./src/Experiment.py --logging_model_name "+str(logging_model_name)+" --target_model_name "+str(target_model_name)+" --soften "+str(soften)+" --kernel "+str(kernel)+" --loss "+str(loss)+" --lip "+str(lip)+" --samples "+str(samples)+" --command_num "+str(i)+"\n")
i+=1
f.close()
!cat commands.sh
python3 ./src/Experiment.py --logging_model_name NNPredictor --target_model_name NNPredictor --soften friendly --kernel boxcar --loss triangular --lip 0.1 --samples 10 --command_num 0
python3 ./src/Experiment.py --logging_model_name NNPredictor --target_model_name NNPredictor --soften friendly --kernel boxcar --loss triangular --lip 0.1 --samples 100 --command_num 1
python3 ./src/Experiment.py --logging_model_name NNPredictor --target_model_name NNPredictor --soften friendly --kernel boxcar --loss triangular --lip 0.1 --samples 1000 --command_num 2
python3 ./src/Experiment.py --logging_model_name NNPredictor --target_model_name NNPredictor --soften friendly --kernel boxcar --loss triangular --lip 1 --samples 10 --command_num 3
python3 ./src/Experiment.py --logging_model_name NNPredictor --target_model_name NNPredictor --soften friendly --kernel boxcar --loss triangular --lip 1 --samples 100 --command_num 4
python3 ./src/Experiment.py --logging_model_name NNPredictor --target_model_name NNPredictor --soften friendly --kernel boxcar --loss triangular --lip 1 --samples 1000 --command_num 5
python3 ./src/Experiment.py --logging_model_name NNPredictor --target_model_name NNPredictor --soften friendly --kernel boxcar --loss triangular --lip 10 --samples 10 --command_num 6
python3 ./src/Experiment.py --logging_model_name NNPredictor --target_model_name NNPredictor --soften friendly --kernel boxcar --loss triangular --lip 10 --samples 100 --command_num 7
python3 ./src/Experiment.py --logging_model_name NNPredictor --target_model_name NNPredictor --soften friendly --kernel boxcar --loss triangular --lip 10 --samples 1000 --command_num 8
python3 ./src/Experiment.py --logging_model_name NNPredictor --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss triangular --lip 0.1 --samples 10 --command_num 9
python3 ./src/Experiment.py --logging_model_name NNPredictor --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss triangular --lip 0.1 --samples 100 --command_num 10
python3 ./src/Experiment.py --logging_model_name NNPredictor --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss triangular --lip 0.1 --samples 1000 --command_num 11
python3 ./src/Experiment.py --logging_model_name NNPredictor --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss triangular --lip 1 --samples 10 --command_num 12
python3 ./src/Experiment.py --logging_model_name NNPredictor --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss triangular --lip 1 --samples 100 --command_num 13
python3 ./src/Experiment.py --logging_model_name NNPredictor --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss triangular --lip 1 --samples 1000 --command_num 14
python3 ./src/Experiment.py --logging_model_name NNPredictor --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss triangular --lip 10 --samples 10 --command_num 15
python3 ./src/Experiment.py --logging_model_name NNPredictor --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss triangular --lip 10 --samples 100 --command_num 16
python3 ./src/Experiment.py --logging_model_name NNPredictor --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss triangular --lip 10 --samples 1000 --command_num 17
python3 ./src/Experiment.py --logging_model_name NNPredictor --target_model_name Tree --soften friendly --kernel boxcar --loss triangular --lip 0.1 --samples 10 --command_num 18
python3 ./src/Experiment.py --logging_model_name NNPredictor --target_model_name Tree --soften friendly --kernel boxcar --loss triangular --lip 0.1 --samples 100 --command_num 19
python3 ./src/Experiment.py --logging_model_name NNPredictor --target_model_name Tree --soften friendly --kernel boxcar --loss triangular --lip 0.1 --samples 1000 --command_num 20
python3 ./src/Experiment.py --logging_model_name NNPredictor --target_model_name Tree --soften friendly --kernel boxcar --loss triangular --lip 1 --samples 10 --command_num 21
python3 ./src/Experiment.py --logging_model_name NNPredictor --target_model_name Tree --soften friendly --kernel boxcar --loss triangular --lip 1 --samples 100 --command_num 22
python3 ./src/Experiment.py --logging_model_name NNPredictor --target_model_name Tree --soften friendly --kernel boxcar --loss triangular --lip 1 --samples 1000 --command_num 23
python3 ./src/Experiment.py --logging_model_name NNPredictor --target_model_name Tree --soften friendly --kernel boxcar --loss triangular --lip 10 --samples 10 --command_num 24
python3 ./src/Experiment.py --logging_model_name NNPredictor --target_model_name Tree --soften friendly --kernel boxcar --loss triangular --lip 10 --samples 100 --command_num 25
python3 ./src/Experiment.py --logging_model_name NNPredictor --target_model_name Tree --soften friendly --kernel boxcar --loss triangular --lip 10 --samples 1000 --command_num 26
python3 ./src/Experiment.py --logging_model_name NNPredictor --target_model_name Tree --soften adversarial --kernel boxcar --loss triangular --lip 0.1 --samples 10 --command_num 27
python3 ./src/Experiment.py --logging_model_name NNPredictor --target_model_name Tree --soften adversarial --kernel boxcar --loss triangular --lip 0.1 --samples 100 --command_num 28
python3 ./src/Experiment.py --logging_model_name NNPredictor --target_model_name Tree --soften adversarial --kernel boxcar --loss triangular --lip 0.1 --samples 1000 --command_num 29
python3 ./src/Experiment.py --logging_model_name NNPredictor --target_model_name Tree --soften adversarial --kernel boxcar --loss triangular --lip 1 --samples 10 --command_num 30
python3 ./src/Experiment.py --logging_model_name NNPredictor --target_model_name Tree --soften adversarial --kernel boxcar --loss triangular --lip 1 --samples 100 --command_num 31
python3 ./src/Experiment.py --logging_model_name NNPredictor --target_model_name Tree --soften adversarial --kernel boxcar --loss triangular --lip 1 --samples 1000 --command_num 32
python3 ./src/Experiment.py --logging_model_name NNPredictor --target_model_name Tree --soften adversarial --kernel boxcar --loss triangular --lip 10 --samples 10 --command_num 33
python3 ./src/Experiment.py --logging_model_name NNPredictor --target_model_name Tree --soften adversarial --kernel boxcar --loss triangular --lip 10 --samples 100 --command_num 34
python3 ./src/Experiment.py --logging_model_name NNPredictor --target_model_name Tree --soften adversarial --kernel boxcar --loss triangular --lip 10 --samples 1000 --command_num 35
python3 ./src/Experiment.py --logging_model_name Tree --target_model_name NNPredictor --soften friendly --kernel boxcar --loss triangular --lip 0.1 --samples 10 --command_num 36
python3 ./src/Experiment.py --logging_model_name Tree --target_model_name NNPredictor --soften friendly --kernel boxcar --loss triangular --lip 0.1 --samples 100 --command_num 37
python3 ./src/Experiment.py --logging_model_name Tree --target_model_name NNPredictor --soften friendly --kernel boxcar --loss triangular --lip 0.1 --samples 1000 --command_num 38
python3 ./src/Experiment.py --logging_model_name Tree --target_model_name NNPredictor --soften friendly --kernel boxcar --loss triangular --lip 1 --samples 10 --command_num 39
python3 ./src/Experiment.py --logging_model_name Tree --target_model_name NNPredictor --soften friendly --kernel boxcar --loss triangular --lip 1 --samples 100 --command_num 40
python3 ./src/Experiment.py --logging_model_name Tree --target_model_name NNPredictor --soften friendly --kernel boxcar --loss triangular --lip 1 --samples 1000 --command_num 41
python3 ./src/Experiment.py --logging_model_name Tree --target_model_name NNPredictor --soften friendly --kernel boxcar --loss triangular --lip 10 --samples 10 --command_num 42
python3 ./src/Experiment.py --logging_model_name Tree --target_model_name NNPredictor --soften friendly --kernel boxcar --loss triangular --lip 10 --samples 100 --command_num 43
python3 ./src/Experiment.py --logging_model_name Tree --target_model_name NNPredictor --soften friendly --kernel boxcar --loss triangular --lip 10 --samples 1000 --command_num 44
python3 ./src/Experiment.py --logging_model_name Tree --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss triangular --lip 0.1 --samples 10 --command_num 45
python3 ./src/Experiment.py --logging_model_name Tree --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss triangular --lip 0.1 --samples 100 --command_num 46
python3 ./src/Experiment.py --logging_model_name Tree --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss triangular --lip 0.1 --samples 1000 --command_num 47
python3 ./src/Experiment.py --logging_model_name Tree --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss triangular --lip 1 --samples 10 --command_num 48
python3 ./src/Experiment.py --logging_model_name Tree --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss triangular --lip 1 --samples 100 --command_num 49
python3 ./src/Experiment.py --logging_model_name Tree --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss triangular --lip 1 --samples 1000 --command_num 50
python3 ./src/Experiment.py --logging_model_name Tree --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss triangular --lip 10 --samples 10 --command_num 51
python3 ./src/Experiment.py --logging_model_name Tree --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss triangular --lip 10 --samples 100 --command_num 52
python3 ./src/Experiment.py --logging_model_name Tree --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss triangular --lip 10 --samples 1000 --command_num 53
python3 ./src/Experiment.py --logging_model_name Tree --target_model_name Tree --soften friendly --kernel boxcar --loss triangular --lip 0.1 --samples 10 --command_num 54
python3 ./src/Experiment.py --logging_model_name Tree --target_model_name Tree --soften friendly --kernel boxcar --loss triangular --lip 0.1 --samples 100 --command_num 55
python3 ./src/Experiment.py --logging_model_name Tree --target_model_name Tree --soften friendly --kernel boxcar --loss triangular --lip 0.1 --samples 1000 --command_num 56
python3 ./src/Experiment.py --logging_model_name Tree --target_model_name Tree --soften friendly --kernel boxcar --loss triangular --lip 1 --samples 10 --command_num 57
python3 ./src/Experiment.py --logging_model_name Tree --target_model_name Tree --soften friendly --kernel boxcar --loss triangular --lip 1 --samples 100 --command_num 58
python3 ./src/Experiment.py --logging_model_name Tree --target_model_name Tree --soften friendly --kernel boxcar --loss triangular --lip 1 --samples 1000 --command_num 59
python3 ./src/Experiment.py --logging_model_name Tree --target_model_name Tree --soften friendly --kernel boxcar --loss triangular --lip 10 --samples 10 --command_num 60
python3 ./src/Experiment.py --logging_model_name Tree --target_model_name Tree --soften friendly --kernel boxcar --loss triangular --lip 10 --samples 100 --command_num 61
python3 ./src/Experiment.py --logging_model_name Tree --target_model_name Tree --soften friendly --kernel boxcar --loss triangular --lip 10 --samples 1000 --command_num 62
python3 ./src/Experiment.py --logging_model_name Tree --target_model_name Tree --soften adversarial --kernel boxcar --loss triangular --lip 0.1 --samples 10 --command_num 63
python3 ./src/Experiment.py --logging_model_name Tree --target_model_name Tree --soften adversarial --kernel boxcar --loss triangular --lip 0.1 --samples 100 --command_num 64
python3 ./src/Experiment.py --logging_model_name Tree --target_model_name Tree --soften adversarial --kernel boxcar --loss triangular --lip 0.1 --samples 1000 --command_num 65
python3 ./src/Experiment.py --logging_model_name Tree --target_model_name Tree --soften adversarial --kernel boxcar --loss triangular --lip 1 --samples 10 --command_num 66
python3 ./src/Experiment.py --logging_model_name Tree --target_model_name Tree --soften adversarial --kernel boxcar --loss triangular --lip 1 --samples 100 --command_num 67
python3 ./src/Experiment.py --logging_model_name Tree --target_model_name Tree --soften adversarial --kernel boxcar --loss triangular --lip 1 --samples 1000 --command_num 68
python3 ./src/Experiment.py --logging_model_name Tree --target_model_name Tree --soften adversarial --kernel boxcar --loss triangular --lip 10 --samples 10 --command_num 69
python3 ./src/Experiment.py --logging_model_name Tree --target_model_name Tree --soften adversarial --kernel boxcar --loss triangular --lip 10 --samples 100 --command_num 70
python3 ./src/Experiment.py --logging_model_name Tree --target_model_name Tree --soften adversarial --kernel boxcar --loss triangular --lip 10 --samples 1000 --command_num 71
f = open('commands_list_test.txt', 'w')
for logging_model_name in ["NNPredictor", "Tree"]:
for target_model_name in ["NNPredictor", "Tree"]:
for soften in ["friendly", "adversarial"]:
for kernel in ["boxcar", "epanechnikov"]:
for loss in ["triangular", "parabolic"]:
for lip in [1, 3, 10]:
for samples in [100,1000,10000,100000]:
f.write("--logging_model_name "+str(logging_model_name)+" --target_model_name "+str(target_model_name)+" --soften "+str(soften)+" --kernel "+str(kernel)+" --loss "+str(loss)+" --lip "+str(lip)+" --samples "+str(samples)+"\n")
f.close()
f = open('commands_list_test.txt', 'a')
for logging_model_name in ["NNPredictor", "Tree"]:
for target_model_name in ["NNPredictor", "Tree"]:
for loss in ["triangular", "parabolic"]:
for lip in [1, 3, 10]:
for kernel in ["boxcar", "epanechnikov"]:
for samples in [100,1000,10000,100000]:
f.write("--logging_model_name "+str(logging_model_name)+" --target_model_name "+str(target_model_name)+" --loss "+str(loss)+" --lip "+str(lip)+" --samples "+str(samples)+" --kernel "+str(kernel)+"\n")
f.close()
!cat commands_list_test.txt
--logging_model_name NNPredictor --target_model_name NNPredictor --soften friendly --kernel boxcar --loss triangular --lip 1 --samples 100
--logging_model_name NNPredictor --target_model_name NNPredictor --soften friendly --kernel boxcar --loss triangular --lip 1 --samples 1000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften friendly --kernel boxcar --loss triangular --lip 1 --samples 10000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften friendly --kernel boxcar --loss triangular --lip 1 --samples 100000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften friendly --kernel boxcar --loss triangular --lip 3 --samples 100
--logging_model_name NNPredictor --target_model_name NNPredictor --soften friendly --kernel boxcar --loss triangular --lip 3 --samples 1000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften friendly --kernel boxcar --loss triangular --lip 3 --samples 10000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften friendly --kernel boxcar --loss triangular --lip 3 --samples 100000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften friendly --kernel boxcar --loss triangular --lip 10 --samples 100
--logging_model_name NNPredictor --target_model_name NNPredictor --soften friendly --kernel boxcar --loss triangular --lip 10 --samples 1000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften friendly --kernel boxcar --loss triangular --lip 10 --samples 10000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften friendly --kernel boxcar --loss triangular --lip 10 --samples 100000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften friendly --kernel boxcar --loss parabolic --lip 1 --samples 100
--logging_model_name NNPredictor --target_model_name NNPredictor --soften friendly --kernel boxcar --loss parabolic --lip 1 --samples 1000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften friendly --kernel boxcar --loss parabolic --lip 1 --samples 10000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften friendly --kernel boxcar --loss parabolic --lip 1 --samples 100000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften friendly --kernel boxcar --loss parabolic --lip 3 --samples 100
--logging_model_name NNPredictor --target_model_name NNPredictor --soften friendly --kernel boxcar --loss parabolic --lip 3 --samples 1000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften friendly --kernel boxcar --loss parabolic --lip 3 --samples 10000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften friendly --kernel boxcar --loss parabolic --lip 3 --samples 100000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften friendly --kernel boxcar --loss parabolic --lip 10 --samples 100
--logging_model_name NNPredictor --target_model_name NNPredictor --soften friendly --kernel boxcar --loss parabolic --lip 10 --samples 1000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften friendly --kernel boxcar --loss parabolic --lip 10 --samples 10000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften friendly --kernel boxcar --loss parabolic --lip 10 --samples 100000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften friendly --kernel epanechnikov --loss triangular --lip 1 --samples 100
--logging_model_name NNPredictor --target_model_name NNPredictor --soften friendly --kernel epanechnikov --loss triangular --lip 1 --samples 1000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften friendly --kernel epanechnikov --loss triangular --lip 1 --samples 10000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften friendly --kernel epanechnikov --loss triangular --lip 1 --samples 100000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften friendly --kernel epanechnikov --loss triangular --lip 3 --samples 100
--logging_model_name NNPredictor --target_model_name NNPredictor --soften friendly --kernel epanechnikov --loss triangular --lip 3 --samples 1000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften friendly --kernel epanechnikov --loss triangular --lip 3 --samples 10000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften friendly --kernel epanechnikov --loss triangular --lip 3 --samples 100000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften friendly --kernel epanechnikov --loss triangular --lip 10 --samples 100
--logging_model_name NNPredictor --target_model_name NNPredictor --soften friendly --kernel epanechnikov --loss triangular --lip 10 --samples 1000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften friendly --kernel epanechnikov --loss triangular --lip 10 --samples 10000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften friendly --kernel epanechnikov --loss triangular --lip 10 --samples 100000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften friendly --kernel epanechnikov --loss parabolic --lip 1 --samples 100
--logging_model_name NNPredictor --target_model_name NNPredictor --soften friendly --kernel epanechnikov --loss parabolic --lip 1 --samples 1000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften friendly --kernel epanechnikov --loss parabolic --lip 1 --samples 10000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften friendly --kernel epanechnikov --loss parabolic --lip 1 --samples 100000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften friendly --kernel epanechnikov --loss parabolic --lip 3 --samples 100
--logging_model_name NNPredictor --target_model_name NNPredictor --soften friendly --kernel epanechnikov --loss parabolic --lip 3 --samples 1000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften friendly --kernel epanechnikov --loss parabolic --lip 3 --samples 10000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften friendly --kernel epanechnikov --loss parabolic --lip 3 --samples 100000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften friendly --kernel epanechnikov --loss parabolic --lip 10 --samples 100
--logging_model_name NNPredictor --target_model_name NNPredictor --soften friendly --kernel epanechnikov --loss parabolic --lip 10 --samples 1000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften friendly --kernel epanechnikov --loss parabolic --lip 10 --samples 10000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften friendly --kernel epanechnikov --loss parabolic --lip 10 --samples 100000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss triangular --lip 1 --samples 100
--logging_model_name NNPredictor --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss triangular --lip 1 --samples 1000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss triangular --lip 1 --samples 10000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss triangular --lip 1 --samples 100000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss triangular --lip 3 --samples 100
--logging_model_name NNPredictor --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss triangular --lip 3 --samples 1000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss triangular --lip 3 --samples 10000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss triangular --lip 3 --samples 100000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss triangular --lip 10 --samples 100
--logging_model_name NNPredictor --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss triangular --lip 10 --samples 1000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss triangular --lip 10 --samples 10000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss triangular --lip 10 --samples 100000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss parabolic --lip 1 --samples 100
--logging_model_name NNPredictor --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss parabolic --lip 1 --samples 1000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss parabolic --lip 1 --samples 10000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss parabolic --lip 1 --samples 100000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss parabolic --lip 3 --samples 100
--logging_model_name NNPredictor --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss parabolic --lip 3 --samples 1000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss parabolic --lip 3 --samples 10000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss parabolic --lip 3 --samples 100000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss parabolic --lip 10 --samples 100
--logging_model_name NNPredictor --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss parabolic --lip 10 --samples 1000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss parabolic --lip 10 --samples 10000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss parabolic --lip 10 --samples 100000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften adversarial --kernel epanechnikov --loss triangular --lip 1 --samples 100
--logging_model_name NNPredictor --target_model_name NNPredictor --soften adversarial --kernel epanechnikov --loss triangular --lip 1 --samples 1000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften adversarial --kernel epanechnikov --loss triangular --lip 1 --samples 10000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften adversarial --kernel epanechnikov --loss triangular --lip 1 --samples 100000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften adversarial --kernel epanechnikov --loss triangular --lip 3 --samples 100
--logging_model_name NNPredictor --target_model_name NNPredictor --soften adversarial --kernel epanechnikov --loss triangular --lip 3 --samples 1000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften adversarial --kernel epanechnikov --loss triangular --lip 3 --samples 10000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften adversarial --kernel epanechnikov --loss triangular --lip 3 --samples 100000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften adversarial --kernel epanechnikov --loss triangular --lip 10 --samples 100
--logging_model_name NNPredictor --target_model_name NNPredictor --soften adversarial --kernel epanechnikov --loss triangular --lip 10 --samples 1000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften adversarial --kernel epanechnikov --loss triangular --lip 10 --samples 10000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften adversarial --kernel epanechnikov --loss triangular --lip 10 --samples 100000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften adversarial --kernel epanechnikov --loss parabolic --lip 1 --samples 100
--logging_model_name NNPredictor --target_model_name NNPredictor --soften adversarial --kernel epanechnikov --loss parabolic --lip 1 --samples 1000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften adversarial --kernel epanechnikov --loss parabolic --lip 1 --samples 10000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften adversarial --kernel epanechnikov --loss parabolic --lip 1 --samples 100000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften adversarial --kernel epanechnikov --loss parabolic --lip 3 --samples 100
--logging_model_name NNPredictor --target_model_name NNPredictor --soften adversarial --kernel epanechnikov --loss parabolic --lip 3 --samples 1000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften adversarial --kernel epanechnikov --loss parabolic --lip 3 --samples 10000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften adversarial --kernel epanechnikov --loss parabolic --lip 3 --samples 100000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften adversarial --kernel epanechnikov --loss parabolic --lip 10 --samples 100
--logging_model_name NNPredictor --target_model_name NNPredictor --soften adversarial --kernel epanechnikov --loss parabolic --lip 10 --samples 1000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften adversarial --kernel epanechnikov --loss parabolic --lip 10 --samples 10000
--logging_model_name NNPredictor --target_model_name NNPredictor --soften adversarial --kernel epanechnikov --loss parabolic --lip 10 --samples 100000
--logging_model_name NNPredictor --target_model_name Tree --soften friendly --kernel boxcar --loss triangular --lip 1 --samples 100
--logging_model_name NNPredictor --target_model_name Tree --soften friendly --kernel boxcar --loss triangular --lip 1 --samples 1000
--logging_model_name NNPredictor --target_model_name Tree --soften friendly --kernel boxcar --loss triangular --lip 1 --samples 10000
--logging_model_name NNPredictor --target_model_name Tree --soften friendly --kernel boxcar --loss triangular --lip 1 --samples 100000
--logging_model_name NNPredictor --target_model_name Tree --soften friendly --kernel boxcar --loss triangular --lip 3 --samples 100
--logging_model_name NNPredictor --target_model_name Tree --soften friendly --kernel boxcar --loss triangular --lip 3 --samples 1000
--logging_model_name NNPredictor --target_model_name Tree --soften friendly --kernel boxcar --loss triangular --lip 3 --samples 10000
--logging_model_name NNPredictor --target_model_name Tree --soften friendly --kernel boxcar --loss triangular --lip 3 --samples 100000
--logging_model_name NNPredictor --target_model_name Tree --soften friendly --kernel boxcar --loss triangular --lip 10 --samples 100
--logging_model_name NNPredictor --target_model_name Tree --soften friendly --kernel boxcar --loss triangular --lip 10 --samples 1000
--logging_model_name NNPredictor --target_model_name Tree --soften friendly --kernel boxcar --loss triangular --lip 10 --samples 10000
--logging_model_name NNPredictor --target_model_name Tree --soften friendly --kernel boxcar --loss triangular --lip 10 --samples 100000
--logging_model_name NNPredictor --target_model_name Tree --soften friendly --kernel boxcar --loss parabolic --lip 1 --samples 100
--logging_model_name NNPredictor --target_model_name Tree --soften friendly --kernel boxcar --loss parabolic --lip 1 --samples 1000
--logging_model_name NNPredictor --target_model_name Tree --soften friendly --kernel boxcar --loss parabolic --lip 1 --samples 10000
--logging_model_name NNPredictor --target_model_name Tree --soften friendly --kernel boxcar --loss parabolic --lip 1 --samples 100000
--logging_model_name NNPredictor --target_model_name Tree --soften friendly --kernel boxcar --loss parabolic --lip 3 --samples 100
--logging_model_name NNPredictor --target_model_name Tree --soften friendly --kernel boxcar --loss parabolic --lip 3 --samples 1000
--logging_model_name NNPredictor --target_model_name Tree --soften friendly --kernel boxcar --loss parabolic --lip 3 --samples 10000
--logging_model_name NNPredictor --target_model_name Tree --soften friendly --kernel boxcar --loss parabolic --lip 3 --samples 100000
--logging_model_name NNPredictor --target_model_name Tree --soften friendly --kernel boxcar --loss parabolic --lip 10 --samples 100
--logging_model_name NNPredictor --target_model_name Tree --soften friendly --kernel boxcar --loss parabolic --lip 10 --samples 1000
--logging_model_name NNPredictor --target_model_name Tree --soften friendly --kernel boxcar --loss parabolic --lip 10 --samples 10000
--logging_model_name NNPredictor --target_model_name Tree --soften friendly --kernel boxcar --loss parabolic --lip 10 --samples 100000
--logging_model_name NNPredictor --target_model_name Tree --soften friendly --kernel epanechnikov --loss triangular --lip 1 --samples 100
--logging_model_name NNPredictor --target_model_name Tree --soften friendly --kernel epanechnikov --loss triangular --lip 1 --samples 1000
--logging_model_name NNPredictor --target_model_name Tree --soften friendly --kernel epanechnikov --loss triangular --lip 1 --samples 10000
--logging_model_name NNPredictor --target_model_name Tree --soften friendly --kernel epanechnikov --loss triangular --lip 1 --samples 100000
--logging_model_name NNPredictor --target_model_name Tree --soften friendly --kernel epanechnikov --loss triangular --lip 3 --samples 100
--logging_model_name NNPredictor --target_model_name Tree --soften friendly --kernel epanechnikov --loss triangular --lip 3 --samples 1000
--logging_model_name NNPredictor --target_model_name Tree --soften friendly --kernel epanechnikov --loss triangular --lip 3 --samples 10000
--logging_model_name NNPredictor --target_model_name Tree --soften friendly --kernel epanechnikov --loss triangular --lip 3 --samples 100000
--logging_model_name NNPredictor --target_model_name Tree --soften friendly --kernel epanechnikov --loss triangular --lip 10 --samples 100
--logging_model_name NNPredictor --target_model_name Tree --soften friendly --kernel epanechnikov --loss triangular --lip 10 --samples 1000
--logging_model_name NNPredictor --target_model_name Tree --soften friendly --kernel epanechnikov --loss triangular --lip 10 --samples 10000
--logging_model_name NNPredictor --target_model_name Tree --soften friendly --kernel epanechnikov --loss triangular --lip 10 --samples 100000
--logging_model_name NNPredictor --target_model_name Tree --soften friendly --kernel epanechnikov --loss parabolic --lip 1 --samples 100
--logging_model_name NNPredictor --target_model_name Tree --soften friendly --kernel epanechnikov --loss parabolic --lip 1 --samples 1000
--logging_model_name NNPredictor --target_model_name Tree --soften friendly --kernel epanechnikov --loss parabolic --lip 1 --samples 10000
--logging_model_name NNPredictor --target_model_name Tree --soften friendly --kernel epanechnikov --loss parabolic --lip 1 --samples 100000
--logging_model_name NNPredictor --target_model_name Tree --soften friendly --kernel epanechnikov --loss parabolic --lip 3 --samples 100
--logging_model_name NNPredictor --target_model_name Tree --soften friendly --kernel epanechnikov --loss parabolic --lip 3 --samples 1000
--logging_model_name NNPredictor --target_model_name Tree --soften friendly --kernel epanechnikov --loss parabolic --lip 3 --samples 10000
--logging_model_name NNPredictor --target_model_name Tree --soften friendly --kernel epanechnikov --loss parabolic --lip 3 --samples 100000
--logging_model_name NNPredictor --target_model_name Tree --soften friendly --kernel epanechnikov --loss parabolic --lip 10 --samples 100
--logging_model_name NNPredictor --target_model_name Tree --soften friendly --kernel epanechnikov --loss parabolic --lip 10 --samples 1000
--logging_model_name NNPredictor --target_model_name Tree --soften friendly --kernel epanechnikov --loss parabolic --lip 10 --samples 10000
--logging_model_name NNPredictor --target_model_name Tree --soften friendly --kernel epanechnikov --loss parabolic --lip 10 --samples 100000
--logging_model_name NNPredictor --target_model_name Tree --soften adversarial --kernel boxcar --loss triangular --lip 1 --samples 100
--logging_model_name NNPredictor --target_model_name Tree --soften adversarial --kernel boxcar --loss triangular --lip 1 --samples 1000
--logging_model_name NNPredictor --target_model_name Tree --soften adversarial --kernel boxcar --loss triangular --lip 1 --samples 10000
--logging_model_name NNPredictor --target_model_name Tree --soften adversarial --kernel boxcar --loss triangular --lip 1 --samples 100000
--logging_model_name NNPredictor --target_model_name Tree --soften adversarial --kernel boxcar --loss triangular --lip 3 --samples 100
--logging_model_name NNPredictor --target_model_name Tree --soften adversarial --kernel boxcar --loss triangular --lip 3 --samples 1000
--logging_model_name NNPredictor --target_model_name Tree --soften adversarial --kernel boxcar --loss triangular --lip 3 --samples 10000
--logging_model_name NNPredictor --target_model_name Tree --soften adversarial --kernel boxcar --loss triangular --lip 3 --samples 100000
--logging_model_name NNPredictor --target_model_name Tree --soften adversarial --kernel boxcar --loss triangular --lip 10 --samples 100
--logging_model_name NNPredictor --target_model_name Tree --soften adversarial --kernel boxcar --loss triangular --lip 10 --samples 1000
--logging_model_name NNPredictor --target_model_name Tree --soften adversarial --kernel boxcar --loss triangular --lip 10 --samples 10000
--logging_model_name NNPredictor --target_model_name Tree --soften adversarial --kernel boxcar --loss triangular --lip 10 --samples 100000
--logging_model_name NNPredictor --target_model_name Tree --soften adversarial --kernel boxcar --loss parabolic --lip 1 --samples 100
--logging_model_name NNPredictor --target_model_name Tree --soften adversarial --kernel boxcar --loss parabolic --lip 1 --samples 1000
--logging_model_name NNPredictor --target_model_name Tree --soften adversarial --kernel boxcar --loss parabolic --lip 1 --samples 10000
--logging_model_name NNPredictor --target_model_name Tree --soften adversarial --kernel boxcar --loss parabolic --lip 1 --samples 100000
--logging_model_name NNPredictor --target_model_name Tree --soften adversarial --kernel boxcar --loss parabolic --lip 3 --samples 100
--logging_model_name NNPredictor --target_model_name Tree --soften adversarial --kernel boxcar --loss parabolic --lip 3 --samples 1000
--logging_model_name NNPredictor --target_model_name Tree --soften adversarial --kernel boxcar --loss parabolic --lip 3 --samples 10000
--logging_model_name NNPredictor --target_model_name Tree --soften adversarial --kernel boxcar --loss parabolic --lip 3 --samples 100000
--logging_model_name NNPredictor --target_model_name Tree --soften adversarial --kernel boxcar --loss parabolic --lip 10 --samples 100
--logging_model_name NNPredictor --target_model_name Tree --soften adversarial --kernel boxcar --loss parabolic --lip 10 --samples 1000
--logging_model_name NNPredictor --target_model_name Tree --soften adversarial --kernel boxcar --loss parabolic --lip 10 --samples 10000
--logging_model_name NNPredictor --target_model_name Tree --soften adversarial --kernel boxcar --loss parabolic --lip 10 --samples 100000
--logging_model_name NNPredictor --target_model_name Tree --soften adversarial --kernel epanechnikov --loss triangular --lip 1 --samples 100
--logging_model_name NNPredictor --target_model_name Tree --soften adversarial --kernel epanechnikov --loss triangular --lip 1 --samples 1000
--logging_model_name NNPredictor --target_model_name Tree --soften adversarial --kernel epanechnikov --loss triangular --lip 1 --samples 10000
--logging_model_name NNPredictor --target_model_name Tree --soften adversarial --kernel epanechnikov --loss triangular --lip 1 --samples 100000
--logging_model_name NNPredictor --target_model_name Tree --soften adversarial --kernel epanechnikov --loss triangular --lip 3 --samples 100
--logging_model_name NNPredictor --target_model_name Tree --soften adversarial --kernel epanechnikov --loss triangular --lip 3 --samples 1000
--logging_model_name NNPredictor --target_model_name Tree --soften adversarial --kernel epanechnikov --loss triangular --lip 3 --samples 10000
--logging_model_name NNPredictor --target_model_name Tree --soften adversarial --kernel epanechnikov --loss triangular --lip 3 --samples 100000
--logging_model_name NNPredictor --target_model_name Tree --soften adversarial --kernel epanechnikov --loss triangular --lip 10 --samples 100
--logging_model_name NNPredictor --target_model_name Tree --soften adversarial --kernel epanechnikov --loss triangular --lip 10 --samples 1000
--logging_model_name NNPredictor --target_model_name Tree --soften adversarial --kernel epanechnikov --loss triangular --lip 10 --samples 10000
--logging_model_name NNPredictor --target_model_name Tree --soften adversarial --kernel epanechnikov --loss triangular --lip 10 --samples 100000
--logging_model_name NNPredictor --target_model_name Tree --soften adversarial --kernel epanechnikov --loss parabolic --lip 1 --samples 100
--logging_model_name NNPredictor --target_model_name Tree --soften adversarial --kernel epanechnikov --loss parabolic --lip 1 --samples 1000
--logging_model_name NNPredictor --target_model_name Tree --soften adversarial --kernel epanechnikov --loss parabolic --lip 1 --samples 10000
--logging_model_name NNPredictor --target_model_name Tree --soften adversarial --kernel epanechnikov --loss parabolic --lip 1 --samples 100000
--logging_model_name NNPredictor --target_model_name Tree --soften adversarial --kernel epanechnikov --loss parabolic --lip 3 --samples 100
--logging_model_name NNPredictor --target_model_name Tree --soften adversarial --kernel epanechnikov --loss parabolic --lip 3 --samples 1000
--logging_model_name NNPredictor --target_model_name Tree --soften adversarial --kernel epanechnikov --loss parabolic --lip 3 --samples 10000
--logging_model_name NNPredictor --target_model_name Tree --soften adversarial --kernel epanechnikov --loss parabolic --lip 3 --samples 100000
--logging_model_name NNPredictor --target_model_name Tree --soften adversarial --kernel epanechnikov --loss parabolic --lip 10 --samples 100
--logging_model_name NNPredictor --target_model_name Tree --soften adversarial --kernel epanechnikov --loss parabolic --lip 10 --samples 1000
--logging_model_name NNPredictor --target_model_name Tree --soften adversarial --kernel epanechnikov --loss parabolic --lip 10 --samples 10000
--logging_model_name NNPredictor --target_model_name Tree --soften adversarial --kernel epanechnikov --loss parabolic --lip 10 --samples 100000
--logging_model_name Tree --target_model_name NNPredictor --soften friendly --kernel boxcar --loss triangular --lip 1 --samples 100
--logging_model_name Tree --target_model_name NNPredictor --soften friendly --kernel boxcar --loss triangular --lip 1 --samples 1000
--logging_model_name Tree --target_model_name NNPredictor --soften friendly --kernel boxcar --loss triangular --lip 1 --samples 10000
--logging_model_name Tree --target_model_name NNPredictor --soften friendly --kernel boxcar --loss triangular --lip 1 --samples 100000
--logging_model_name Tree --target_model_name NNPredictor --soften friendly --kernel boxcar --loss triangular --lip 3 --samples 100
--logging_model_name Tree --target_model_name NNPredictor --soften friendly --kernel boxcar --loss triangular --lip 3 --samples 1000
--logging_model_name Tree --target_model_name NNPredictor --soften friendly --kernel boxcar --loss triangular --lip 3 --samples 10000
--logging_model_name Tree --target_model_name NNPredictor --soften friendly --kernel boxcar --loss triangular --lip 3 --samples 100000
--logging_model_name Tree --target_model_name NNPredictor --soften friendly --kernel boxcar --loss triangular --lip 10 --samples 100
--logging_model_name Tree --target_model_name NNPredictor --soften friendly --kernel boxcar --loss triangular --lip 10 --samples 1000
--logging_model_name Tree --target_model_name NNPredictor --soften friendly --kernel boxcar --loss triangular --lip 10 --samples 10000
--logging_model_name Tree --target_model_name NNPredictor --soften friendly --kernel boxcar --loss triangular --lip 10 --samples 100000
--logging_model_name Tree --target_model_name NNPredictor --soften friendly --kernel boxcar --loss parabolic --lip 1 --samples 100
--logging_model_name Tree --target_model_name NNPredictor --soften friendly --kernel boxcar --loss parabolic --lip 1 --samples 1000
--logging_model_name Tree --target_model_name NNPredictor --soften friendly --kernel boxcar --loss parabolic --lip 1 --samples 10000
--logging_model_name Tree --target_model_name NNPredictor --soften friendly --kernel boxcar --loss parabolic --lip 1 --samples 100000
--logging_model_name Tree --target_model_name NNPredictor --soften friendly --kernel boxcar --loss parabolic --lip 3 --samples 100
--logging_model_name Tree --target_model_name NNPredictor --soften friendly --kernel boxcar --loss parabolic --lip 3 --samples 1000
--logging_model_name Tree --target_model_name NNPredictor --soften friendly --kernel boxcar --loss parabolic --lip 3 --samples 10000
--logging_model_name Tree --target_model_name NNPredictor --soften friendly --kernel boxcar --loss parabolic --lip 3 --samples 100000
--logging_model_name Tree --target_model_name NNPredictor --soften friendly --kernel boxcar --loss parabolic --lip 10 --samples 100
--logging_model_name Tree --target_model_name NNPredictor --soften friendly --kernel boxcar --loss parabolic --lip 10 --samples 1000
--logging_model_name Tree --target_model_name NNPredictor --soften friendly --kernel boxcar --loss parabolic --lip 10 --samples 10000
--logging_model_name Tree --target_model_name NNPredictor --soften friendly --kernel boxcar --loss parabolic --lip 10 --samples 100000
--logging_model_name Tree --target_model_name NNPredictor --soften friendly --kernel epanechnikov --loss triangular --lip 1 --samples 100
--logging_model_name Tree --target_model_name NNPredictor --soften friendly --kernel epanechnikov --loss triangular --lip 1 --samples 1000
--logging_model_name Tree --target_model_name NNPredictor --soften friendly --kernel epanechnikov --loss triangular --lip 1 --samples 10000
--logging_model_name Tree --target_model_name NNPredictor --soften friendly --kernel epanechnikov --loss triangular --lip 1 --samples 100000
--logging_model_name Tree --target_model_name NNPredictor --soften friendly --kernel epanechnikov --loss triangular --lip 3 --samples 100
--logging_model_name Tree --target_model_name NNPredictor --soften friendly --kernel epanechnikov --loss triangular --lip 3 --samples 1000
--logging_model_name Tree --target_model_name NNPredictor --soften friendly --kernel epanechnikov --loss triangular --lip 3 --samples 10000
--logging_model_name Tree --target_model_name NNPredictor --soften friendly --kernel epanechnikov --loss triangular --lip 3 --samples 100000
--logging_model_name Tree --target_model_name NNPredictor --soften friendly --kernel epanechnikov --loss triangular --lip 10 --samples 100
--logging_model_name Tree --target_model_name NNPredictor --soften friendly --kernel epanechnikov --loss triangular --lip 10 --samples 1000
--logging_model_name Tree --target_model_name NNPredictor --soften friendly --kernel epanechnikov --loss triangular --lip 10 --samples 10000
--logging_model_name Tree --target_model_name NNPredictor --soften friendly --kernel epanechnikov --loss triangular --lip 10 --samples 100000
--logging_model_name Tree --target_model_name NNPredictor --soften friendly --kernel epanechnikov --loss parabolic --lip 1 --samples 100
--logging_model_name Tree --target_model_name NNPredictor --soften friendly --kernel epanechnikov --loss parabolic --lip 1 --samples 1000
--logging_model_name Tree --target_model_name NNPredictor --soften friendly --kernel epanechnikov --loss parabolic --lip 1 --samples 10000
--logging_model_name Tree --target_model_name NNPredictor --soften friendly --kernel epanechnikov --loss parabolic --lip 1 --samples 100000
--logging_model_name Tree --target_model_name NNPredictor --soften friendly --kernel epanechnikov --loss parabolic --lip 3 --samples 100
--logging_model_name Tree --target_model_name NNPredictor --soften friendly --kernel epanechnikov --loss parabolic --lip 3 --samples 1000
--logging_model_name Tree --target_model_name NNPredictor --soften friendly --kernel epanechnikov --loss parabolic --lip 3 --samples 10000
--logging_model_name Tree --target_model_name NNPredictor --soften friendly --kernel epanechnikov --loss parabolic --lip 3 --samples 100000
--logging_model_name Tree --target_model_name NNPredictor --soften friendly --kernel epanechnikov --loss parabolic --lip 10 --samples 100
--logging_model_name Tree --target_model_name NNPredictor --soften friendly --kernel epanechnikov --loss parabolic --lip 10 --samples 1000
--logging_model_name Tree --target_model_name NNPredictor --soften friendly --kernel epanechnikov --loss parabolic --lip 10 --samples 10000
--logging_model_name Tree --target_model_name NNPredictor --soften friendly --kernel epanechnikov --loss parabolic --lip 10 --samples 100000
--logging_model_name Tree --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss triangular --lip 1 --samples 100
--logging_model_name Tree --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss triangular --lip 1 --samples 1000
--logging_model_name Tree --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss triangular --lip 1 --samples 10000
--logging_model_name Tree --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss triangular --lip 1 --samples 100000
--logging_model_name Tree --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss triangular --lip 3 --samples 100
--logging_model_name Tree --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss triangular --lip 3 --samples 1000
--logging_model_name Tree --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss triangular --lip 3 --samples 10000
--logging_model_name Tree --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss triangular --lip 3 --samples 100000
--logging_model_name Tree --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss triangular --lip 10 --samples 100
--logging_model_name Tree --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss triangular --lip 10 --samples 1000
--logging_model_name Tree --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss triangular --lip 10 --samples 10000
--logging_model_name Tree --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss triangular --lip 10 --samples 100000
--logging_model_name Tree --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss parabolic --lip 1 --samples 100
--logging_model_name Tree --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss parabolic --lip 1 --samples 1000
--logging_model_name Tree --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss parabolic --lip 1 --samples 10000
--logging_model_name Tree --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss parabolic --lip 1 --samples 100000
--logging_model_name Tree --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss parabolic --lip 3 --samples 100
--logging_model_name Tree --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss parabolic --lip 3 --samples 1000
--logging_model_name Tree --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss parabolic --lip 3 --samples 10000
--logging_model_name Tree --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss parabolic --lip 3 --samples 100000
--logging_model_name Tree --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss parabolic --lip 10 --samples 100
--logging_model_name Tree --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss parabolic --lip 10 --samples 1000
--logging_model_name Tree --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss parabolic --lip 10 --samples 10000
--logging_model_name Tree --target_model_name NNPredictor --soften adversarial --kernel boxcar --loss parabolic --lip 10 --samples 100000
--logging_model_name Tree --target_model_name NNPredictor --soften adversarial --kernel epanechnikov --loss triangular --lip 1 --samples 100
--logging_model_name Tree --target_model_name NNPredictor --soften adversarial --kernel epanechnikov --loss triangular --lip 1 --samples 1000
--logging_model_name Tree --target_model_name NNPredictor --soften adversarial --kernel epanechnikov --loss triangular --lip 1 --samples 10000
--logging_model_name Tree --target_model_name NNPredictor --soften adversarial --kernel epanechnikov --loss triangular --lip 1 --samples 100000
--logging_model_name Tree --target_model_name NNPredictor --soften adversarial --kernel epanechnikov --loss triangular --lip 3 --samples 100
--logging_model_name Tree --target_model_name NNPredictor --soften adversarial --kernel epanechnikov --loss triangular --lip 3 --samples 1000
--logging_model_name Tree --target_model_name NNPredictor --soften adversarial --kernel epanechnikov --loss triangular --lip 3 --samples 10000
--logging_model_name Tree --target_model_name NNPredictor --soften adversarial --kernel epanechnikov --loss triangular --lip 3 --samples 100000
--logging_model_name Tree --target_model_name NNPredictor --soften adversarial --kernel epanechnikov --loss triangular --lip 10 --samples 100
--logging_model_name Tree --target_model_name NNPredictor --soften adversarial --kernel epanechnikov --loss triangular --lip 10 --samples 1000
--logging_model_name Tree --target_model_name NNPredictor --soften adversarial --kernel epanechnikov --loss triangular --lip 10 --samples 10000
--logging_model_name Tree --target_model_name NNPredictor --soften adversarial --kernel epanechnikov --loss triangular --lip 10 --samples 100000
--logging_model_name Tree --target_model_name NNPredictor --soften adversarial --kernel epanechnikov --loss parabolic --lip 1 --samples 100
--logging_model_name Tree --target_model_name NNPredictor --soften adversarial --kernel epanechnikov --loss parabolic --lip 1 --samples 1000
--logging_model_name Tree --target_model_name NNPredictor --soften adversarial --kernel epanechnikov --loss parabolic --lip 1 --samples 10000
--logging_model_name Tree --target_model_name NNPredictor --soften adversarial --kernel epanechnikov --loss parabolic --lip 1 --samples 100000
--logging_model_name Tree --target_model_name NNPredictor --soften adversarial --kernel epanechnikov --loss parabolic --lip 3 --samples 100
--logging_model_name Tree --target_model_name NNPredictor --soften adversarial --kernel epanechnikov --loss parabolic --lip 3 --samples 1000
--logging_model_name Tree --target_model_name NNPredictor --soften adversarial --kernel epanechnikov --loss parabolic --lip 3 --samples 10000
--logging_model_name Tree --target_model_name NNPredictor --soften adversarial --kernel epanechnikov --loss parabolic --lip 3 --samples 100000
--logging_model_name Tree --target_model_name NNPredictor --soften adversarial --kernel epanechnikov --loss parabolic --lip 10 --samples 100
--logging_model_name Tree --target_model_name NNPredictor --soften adversarial --kernel epanechnikov --loss parabolic --lip 10 --samples 1000
--logging_model_name Tree --target_model_name NNPredictor --soften adversarial --kernel epanechnikov --loss parabolic --lip 10 --samples 10000
--logging_model_name Tree --target_model_name NNPredictor --soften adversarial --kernel epanechnikov --loss parabolic --lip 10 --samples 100000
--logging_model_name Tree --target_model_name Tree --soften friendly --kernel boxcar --loss triangular --lip 1 --samples 100
--logging_model_name Tree --target_model_name Tree --soften friendly --kernel boxcar --loss triangular --lip 1 --samples 1000
--logging_model_name Tree --target_model_name Tree --soften friendly --kernel boxcar --loss triangular --lip 1 --samples 10000
--logging_model_name Tree --target_model_name Tree --soften friendly --kernel boxcar --loss triangular --lip 1 --samples 100000
--logging_model_name Tree --target_model_name Tree --soften friendly --kernel boxcar --loss triangular --lip 3 --samples 100
--logging_model_name Tree --target_model_name Tree --soften friendly --kernel boxcar --loss triangular --lip 3 --samples 1000
--logging_model_name Tree --target_model_name Tree --soften friendly --kernel boxcar --loss triangular --lip 3 --samples 10000
--logging_model_name Tree --target_model_name Tree --soften friendly --kernel boxcar --loss triangular --lip 3 --samples 100000
--logging_model_name Tree --target_model_name Tree --soften friendly --kernel boxcar --loss triangular --lip 10 --samples 100
--logging_model_name Tree --target_model_name Tree --soften friendly --kernel boxcar --loss triangular --lip 10 --samples 1000
--logging_model_name Tree --target_model_name Tree --soften friendly --kernel boxcar --loss triangular --lip 10 --samples 10000
--logging_model_name Tree --target_model_name Tree --soften friendly --kernel boxcar --loss triangular --lip 10 --samples 100000
--logging_model_name Tree --target_model_name Tree --soften friendly --kernel boxcar --loss parabolic --lip 1 --samples 100
--logging_model_name Tree --target_model_name Tree --soften friendly --kernel boxcar --loss parabolic --lip 1 --samples 1000
--logging_model_name Tree --target_model_name Tree --soften friendly --kernel boxcar --loss parabolic --lip 1 --samples 10000
--logging_model_name Tree --target_model_name Tree --soften friendly --kernel boxcar --loss parabolic --lip 1 --samples 100000
--logging_model_name Tree --target_model_name Tree --soften friendly --kernel boxcar --loss parabolic --lip 3 --samples 100
--logging_model_name Tree --target_model_name Tree --soften friendly --kernel boxcar --loss parabolic --lip 3 --samples 1000
--logging_model_name Tree --target_model_name Tree --soften friendly --kernel boxcar --loss parabolic --lip 3 --samples 10000
--logging_model_name Tree --target_model_name Tree --soften friendly --kernel boxcar --loss parabolic --lip 3 --samples 100000
--logging_model_name Tree --target_model_name Tree --soften friendly --kernel boxcar --loss parabolic --lip 10 --samples 100
--logging_model_name Tree --target_model_name Tree --soften friendly --kernel boxcar --loss parabolic --lip 10 --samples 1000
--logging_model_name Tree --target_model_name Tree --soften friendly --kernel boxcar --loss parabolic --lip 10 --samples 10000
--logging_model_name Tree --target_model_name Tree --soften friendly --kernel boxcar --loss parabolic --lip 10 --samples 100000
--logging_model_name Tree --target_model_name Tree --soften friendly --kernel epanechnikov --loss triangular --lip 1 --samples 100
--logging_model_name Tree --target_model_name Tree --soften friendly --kernel epanechnikov --loss triangular --lip 1 --samples 1000
--logging_model_name Tree --target_model_name Tree --soften friendly --kernel epanechnikov --loss triangular --lip 1 --samples 10000
--logging_model_name Tree --target_model_name Tree --soften friendly --kernel epanechnikov --loss triangular --lip 1 --samples 100000
--logging_model_name Tree --target_model_name Tree --soften friendly --kernel epanechnikov --loss triangular --lip 3 --samples 100
--logging_model_name Tree --target_model_name Tree --soften friendly --kernel epanechnikov --loss triangular --lip 3 --samples 1000
--logging_model_name Tree --target_model_name Tree --soften friendly --kernel epanechnikov --loss triangular --lip 3 --samples 10000
--logging_model_name Tree --target_model_name Tree --soften friendly --kernel epanechnikov --loss triangular --lip 3 --samples 100000
--logging_model_name Tree --target_model_name Tree --soften friendly --kernel epanechnikov --loss triangular --lip 10 --samples 100
--logging_model_name Tree --target_model_name Tree --soften friendly --kernel epanechnikov --loss triangular --lip 10 --samples 1000
--logging_model_name Tree --target_model_name Tree --soften friendly --kernel epanechnikov --loss triangular --lip 10 --samples 10000
--logging_model_name Tree --target_model_name Tree --soften friendly --kernel epanechnikov --loss triangular --lip 10 --samples 100000
--logging_model_name Tree --target_model_name Tree --soften friendly --kernel epanechnikov --loss parabolic --lip 1 --samples 100
--logging_model_name Tree --target_model_name Tree --soften friendly --kernel epanechnikov --loss parabolic --lip 1 --samples 1000
--logging_model_name Tree --target_model_name Tree --soften friendly --kernel epanechnikov --loss parabolic --lip 1 --samples 10000
--logging_model_name Tree --target_model_name Tree --soften friendly --kernel epanechnikov --loss parabolic --lip 1 --samples 100000
--logging_model_name Tree --target_model_name Tree --soften friendly --kernel epanechnikov --loss parabolic --lip 3 --samples 100
--logging_model_name Tree --target_model_name Tree --soften friendly --kernel epanechnikov --loss parabolic --lip 3 --samples 1000
--logging_model_name Tree --target_model_name Tree --soften friendly --kernel epanechnikov --loss parabolic --lip 3 --samples 10000
--logging_model_name Tree --target_model_name Tree --soften friendly --kernel epanechnikov --loss parabolic --lip 3 --samples 100000
--logging_model_name Tree --target_model_name Tree --soften friendly --kernel epanechnikov --loss parabolic --lip 10 --samples 100
--logging_model_name Tree --target_model_name Tree --soften friendly --kernel epanechnikov --loss parabolic --lip 10 --samples 1000
--logging_model_name Tree --target_model_name Tree --soften friendly --kernel epanechnikov --loss parabolic --lip 10 --samples 10000
--logging_model_name Tree --target_model_name Tree --soften friendly --kernel epanechnikov --loss parabolic --lip 10 --samples 100000
--logging_model_name Tree --target_model_name Tree --soften adversarial --kernel boxcar --loss triangular --lip 1 --samples 100
--logging_model_name Tree --target_model_name Tree --soften adversarial --kernel boxcar --loss triangular --lip 1 --samples 1000
--logging_model_name Tree --target_model_name Tree --soften adversarial --kernel boxcar --loss triangular --lip 1 --samples 10000
--logging_model_name Tree --target_model_name Tree --soften adversarial --kernel boxcar --loss triangular --lip 1 --samples 100000
--logging_model_name Tree --target_model_name Tree --soften adversarial --kernel boxcar --loss triangular --lip 3 --samples 100
--logging_model_name Tree --target_model_name Tree --soften adversarial --kernel boxcar --loss triangular --lip 3 --samples 1000
--logging_model_name Tree --target_model_name Tree --soften adversarial --kernel boxcar --loss triangular --lip 3 --samples 10000
--logging_model_name Tree --target_model_name Tree --soften adversarial --kernel boxcar --loss triangular --lip 3 --samples 100000
--logging_model_name Tree --target_model_name Tree --soften adversarial --kernel boxcar --loss triangular --lip 10 --samples 100
--logging_model_name Tree --target_model_name Tree --soften adversarial --kernel boxcar --loss triangular --lip 10 --samples 1000
--logging_model_name Tree --target_model_name Tree --soften adversarial --kernel boxcar --loss triangular --lip 10 --samples 10000
--logging_model_name Tree --target_model_name Tree --soften adversarial --kernel boxcar --loss triangular --lip 10 --samples 100000
--logging_model_name Tree --target_model_name Tree --soften adversarial --kernel boxcar --loss parabolic --lip 1 --samples 100
--logging_model_name Tree --target_model_name Tree --soften adversarial --kernel boxcar --loss parabolic --lip 1 --samples 1000
--logging_model_name Tree --target_model_name Tree --soften adversarial --kernel boxcar --loss parabolic --lip 1 --samples 10000
--logging_model_name Tree --target_model_name Tree --soften adversarial --kernel boxcar --loss parabolic --lip 1 --samples 100000
--logging_model_name Tree --target_model_name Tree --soften adversarial --kernel boxcar --loss parabolic --lip 3 --samples 100
--logging_model_name Tree --target_model_name Tree --soften adversarial --kernel boxcar --loss parabolic --lip 3 --samples 1000
--logging_model_name Tree --target_model_name Tree --soften adversarial --kernel boxcar --loss parabolic --lip 3 --samples 10000
--logging_model_name Tree --target_model_name Tree --soften adversarial --kernel boxcar --loss parabolic --lip 3 --samples 100000
--logging_model_name Tree --target_model_name Tree --soften adversarial --kernel boxcar --loss parabolic --lip 10 --samples 100
--logging_model_name Tree --target_model_name Tree --soften adversarial --kernel boxcar --loss parabolic --lip 10 --samples 1000
--logging_model_name Tree --target_model_name Tree --soften adversarial --kernel boxcar --loss parabolic --lip 10 --samples 10000
--logging_model_name Tree --target_model_name Tree --soften adversarial --kernel boxcar --loss parabolic --lip 10 --samples 100000
--logging_model_name Tree --target_model_name Tree --soften adversarial --kernel epanechnikov --loss triangular --lip 1 --samples 100
--logging_model_name Tree --target_model_name Tree --soften adversarial --kernel epanechnikov --loss triangular --lip 1 --samples 1000
--logging_model_name Tree --target_model_name Tree --soften adversarial --kernel epanechnikov --loss triangular --lip 1 --samples 10000
--logging_model_name Tree --target_model_name Tree --soften adversarial --kernel epanechnikov --loss triangular --lip 1 --samples 100000
--logging_model_name Tree --target_model_name Tree --soften adversarial --kernel epanechnikov --loss triangular --lip 3 --samples 100
--logging_model_name Tree --target_model_name Tree --soften adversarial --kernel epanechnikov --loss triangular --lip 3 --samples 1000
--logging_model_name Tree --target_model_name Tree --soften adversarial --kernel epanechnikov --loss triangular --lip 3 --samples 10000
--logging_model_name Tree --target_model_name Tree --soften adversarial --kernel epanechnikov --loss triangular --lip 3 --samples 100000
--logging_model_name Tree --target_model_name Tree --soften adversarial --kernel epanechnikov --loss triangular --lip 10 --samples 100
--logging_model_name Tree --target_model_name Tree --soften adversarial --kernel epanechnikov --loss triangular --lip 10 --samples 1000
--logging_model_name Tree --target_model_name Tree --soften adversarial --kernel epanechnikov --loss triangular --lip 10 --samples 10000
--logging_model_name Tree --target_model_name Tree --soften adversarial --kernel epanechnikov --loss triangular --lip 10 --samples 100000
--logging_model_name Tree --target_model_name Tree --soften adversarial --kernel epanechnikov --loss parabolic --lip 1 --samples 100
--logging_model_name Tree --target_model_name Tree --soften adversarial --kernel epanechnikov --loss parabolic --lip 1 --samples 1000
--logging_model_name Tree --target_model_name Tree --soften adversarial --kernel epanechnikov --loss parabolic --lip 1 --samples 10000
--logging_model_name Tree --target_model_name Tree --soften adversarial --kernel epanechnikov --loss parabolic --lip 1 --samples 100000
--logging_model_name Tree --target_model_name Tree --soften adversarial --kernel epanechnikov --loss parabolic --lip 3 --samples 100
--logging_model_name Tree --target_model_name Tree --soften adversarial --kernel epanechnikov --loss parabolic --lip 3 --samples 1000
--logging_model_name Tree --target_model_name Tree --soften adversarial --kernel epanechnikov --loss parabolic --lip 3 --samples 10000
--logging_model_name Tree --target_model_name Tree --soften adversarial --kernel epanechnikov --loss parabolic --lip 3 --samples 100000
--logging_model_name Tree --target_model_name Tree --soften adversarial --kernel epanechnikov --loss parabolic --lip 10 --samples 100
--logging_model_name Tree --target_model_name Tree --soften adversarial --kernel epanechnikov --loss parabolic --lip 10 --samples 1000
--logging_model_name Tree --target_model_name Tree --soften adversarial --kernel epanechnikov --loss parabolic --lip 10 --samples 10000
--logging_model_name Tree --target_model_name Tree --soften adversarial --kernel epanechnikov --loss parabolic --lip 10 --samples 100000
--logging_model_name NNPredictor --target_model_name NNPredictor --loss triangular --lip 1 --samples 100 --kernel boxcar
--logging_model_name NNPredictor --target_model_name NNPredictor --loss triangular --lip 1 --samples 1000 --kernel boxcar
--logging_model_name NNPredictor --target_model_name NNPredictor --loss triangular --lip 1 --samples 10000 --kernel boxcar
--logging_model_name NNPredictor --target_model_name NNPredictor --loss triangular --lip 1 --samples 100000 --kernel boxcar
--logging_model_name NNPredictor --target_model_name NNPredictor --loss triangular --lip 1 --samples 100 --kernel epanechnikov
--logging_model_name NNPredictor --target_model_name NNPredictor --loss triangular --lip 1 --samples 1000 --kernel epanechnikov
--logging_model_name NNPredictor --target_model_name NNPredictor --loss triangular --lip 1 --samples 10000 --kernel epanechnikov
--logging_model_name NNPredictor --target_model_name NNPredictor --loss triangular --lip 1 --samples 100000 --kernel epanechnikov
--logging_model_name NNPredictor --target_model_name NNPredictor --loss triangular --lip 3 --samples 100 --kernel boxcar
--logging_model_name NNPredictor --target_model_name NNPredictor --loss triangular --lip 3 --samples 1000 --kernel boxcar
--logging_model_name NNPredictor --target_model_name NNPredictor --loss triangular --lip 3 --samples 10000 --kernel boxcar
--logging_model_name NNPredictor --target_model_name NNPredictor --loss triangular --lip 3 --samples 100000 --kernel boxcar
--logging_model_name NNPredictor --target_model_name NNPredictor --loss triangular --lip 3 --samples 100 --kernel epanechnikov
--logging_model_name NNPredictor --target_model_name NNPredictor --loss triangular --lip 3 --samples 1000 --kernel epanechnikov
--logging_model_name NNPredictor --target_model_name NNPredictor --loss triangular --lip 3 --samples 10000 --kernel epanechnikov
--logging_model_name NNPredictor --target_model_name NNPredictor --loss triangular --lip 3 --samples 100000 --kernel epanechnikov
--logging_model_name NNPredictor --target_model_name NNPredictor --loss triangular --lip 10 --samples 100 --kernel boxcar
--logging_model_name NNPredictor --target_model_name NNPredictor --loss triangular --lip 10 --samples 1000 --kernel boxcar
--logging_model_name NNPredictor --target_model_name NNPredictor --loss triangular --lip 10 --samples 10000 --kernel boxcar
--logging_model_name NNPredictor --target_model_name NNPredictor --loss triangular --lip 10 --samples 100000 --kernel boxcar
--logging_model_name NNPredictor --target_model_name NNPredictor --loss triangular --lip 10 --samples 100 --kernel epanechnikov
--logging_model_name NNPredictor --target_model_name NNPredictor --loss triangular --lip 10 --samples 1000 --kernel epanechnikov
--logging_model_name NNPredictor --target_model_name NNPredictor --loss triangular --lip 10 --samples 10000 --kernel epanechnikov
--logging_model_name NNPredictor --target_model_name NNPredictor --loss triangular --lip 10 --samples 100000 --kernel epanechnikov
--logging_model_name NNPredictor --target_model_name NNPredictor --loss parabolic --lip 1 --samples 100 --kernel boxcar
--logging_model_name NNPredictor --target_model_name NNPredictor --loss parabolic --lip 1 --samples 1000 --kernel boxcar
--logging_model_name NNPredictor --target_model_name NNPredictor --loss parabolic --lip 1 --samples 10000 --kernel boxcar
--logging_model_name NNPredictor --target_model_name NNPredictor --loss parabolic --lip 1 --samples 100000 --kernel boxcar
--logging_model_name NNPredictor --target_model_name NNPredictor --loss parabolic --lip 1 --samples 100 --kernel epanechnikov
--logging_model_name NNPredictor --target_model_name NNPredictor --loss parabolic --lip 1 --samples 1000 --kernel epanechnikov
--logging_model_name NNPredictor --target_model_name NNPredictor --loss parabolic --lip 1 --samples 10000 --kernel epanechnikov
--logging_model_name NNPredictor --target_model_name NNPredictor --loss parabolic --lip 1 --samples 100000 --kernel epanechnikov
--logging_model_name NNPredictor --target_model_name NNPredictor --loss parabolic --lip 3 --samples 100 --kernel boxcar
--logging_model_name NNPredictor --target_model_name NNPredictor --loss parabolic --lip 3 --samples 1000 --kernel boxcar
--logging_model_name NNPredictor --target_model_name NNPredictor --loss parabolic --lip 3 --samples 10000 --kernel boxcar
--logging_model_name NNPredictor --target_model_name NNPredictor --loss parabolic --lip 3 --samples 100000 --kernel boxcar
--logging_model_name NNPredictor --target_model_name NNPredictor --loss parabolic --lip 3 --samples 100 --kernel epanechnikov
--logging_model_name NNPredictor --target_model_name NNPredictor --loss parabolic --lip 3 --samples 1000 --kernel epanechnikov
--logging_model_name NNPredictor --target_model_name NNPredictor --loss parabolic --lip 3 --samples 10000 --kernel epanechnikov
--logging_model_name NNPredictor --target_model_name NNPredictor --loss parabolic --lip 3 --samples 100000 --kernel epanechnikov
--logging_model_name NNPredictor --target_model_name NNPredictor --loss parabolic --lip 10 --samples 100 --kernel boxcar
--logging_model_name NNPredictor --target_model_name NNPredictor --loss parabolic --lip 10 --samples 1000 --kernel boxcar
--logging_model_name NNPredictor --target_model_name NNPredictor --loss parabolic --lip 10 --samples 10000 --kernel boxcar
--logging_model_name NNPredictor --target_model_name NNPredictor --loss parabolic --lip 10 --samples 100000 --kernel boxcar
--logging_model_name NNPredictor --target_model_name NNPredictor --loss parabolic --lip 10 --samples 100 --kernel epanechnikov
--logging_model_name NNPredictor --target_model_name NNPredictor --loss parabolic --lip 10 --samples 1000 --kernel epanechnikov
--logging_model_name NNPredictor --target_model_name NNPredictor --loss parabolic --lip 10 --samples 10000 --kernel epanechnikov
--logging_model_name NNPredictor --target_model_name NNPredictor --loss parabolic --lip 10 --samples 100000 --kernel epanechnikov
--logging_model_name NNPredictor --target_model_name Tree --loss triangular --lip 1 --samples 100 --kernel boxcar
--logging_model_name NNPredictor --target_model_name Tree --loss triangular --lip 1 --samples 1000 --kernel boxcar
--logging_model_name NNPredictor --target_model_name Tree --loss triangular --lip 1 --samples 10000 --kernel boxcar
--logging_model_name NNPredictor --target_model_name Tree --loss triangular --lip 1 --samples 100000 --kernel boxcar
--logging_model_name NNPredictor --target_model_name Tree --loss triangular --lip 1 --samples 100 --kernel epanechnikov
--logging_model_name NNPredictor --target_model_name Tree --loss triangular --lip 1 --samples 1000 --kernel epanechnikov
--logging_model_name NNPredictor --target_model_name Tree --loss triangular --lip 1 --samples 10000 --kernel epanechnikov
--logging_model_name NNPredictor --target_model_name Tree --loss triangular --lip 1 --samples 100000 --kernel epanechnikov
--logging_model_name NNPredictor --target_model_name Tree --loss triangular --lip 3 --samples 100 --kernel boxcar
--logging_model_name NNPredictor --target_model_name Tree --loss triangular --lip 3 --samples 1000 --kernel boxcar
--logging_model_name NNPredictor --target_model_name Tree --loss triangular --lip 3 --samples 10000 --kernel boxcar
--logging_model_name NNPredictor --target_model_name Tree --loss triangular --lip 3 --samples 100000 --kernel boxcar
--logging_model_name NNPredictor --target_model_name Tree --loss triangular --lip 3 --samples 100 --kernel epanechnikov
--logging_model_name NNPredictor --target_model_name Tree --loss triangular --lip 3 --samples 1000 --kernel epanechnikov
--logging_model_name NNPredictor --target_model_name Tree --loss triangular --lip 3 --samples 10000 --kernel epanechnikov
--logging_model_name NNPredictor --target_model_name Tree --loss triangular --lip 3 --samples 100000 --kernel epanechnikov
--logging_model_name NNPredictor --target_model_name Tree --loss triangular --lip 10 --samples 100 --kernel boxcar
--logging_model_name NNPredictor --target_model_name Tree --loss triangular --lip 10 --samples 1000 --kernel boxcar
--logging_model_name NNPredictor --target_model_name Tree --loss triangular --lip 10 --samples 10000 --kernel boxcar
--logging_model_name NNPredictor --target_model_name Tree --loss triangular --lip 10 --samples 100000 --kernel boxcar
--logging_model_name NNPredictor --target_model_name Tree --loss triangular --lip 10 --samples 100 --kernel epanechnikov
--logging_model_name NNPredictor --target_model_name Tree --loss triangular --lip 10 --samples 1000 --kernel epanechnikov
--logging_model_name NNPredictor --target_model_name Tree --loss triangular --lip 10 --samples 10000 --kernel epanechnikov
--logging_model_name NNPredictor --target_model_name Tree --loss triangular --lip 10 --samples 100000 --kernel epanechnikov
--logging_model_name NNPredictor --target_model_name Tree --loss parabolic --lip 1 --samples 100 --kernel boxcar
--logging_model_name NNPredictor --target_model_name Tree --loss parabolic --lip 1 --samples 1000 --kernel boxcar
--logging_model_name NNPredictor --target_model_name Tree --loss parabolic --lip 1 --samples 10000 --kernel boxcar
--logging_model_name NNPredictor --target_model_name Tree --loss parabolic --lip 1 --samples 100000 --kernel boxcar
--logging_model_name NNPredictor --target_model_name Tree --loss parabolic --lip 1 --samples 100 --kernel epanechnikov
--logging_model_name NNPredictor --target_model_name Tree --loss parabolic --lip 1 --samples 1000 --kernel epanechnikov
--logging_model_name NNPredictor --target_model_name Tree --loss parabolic --lip 1 --samples 10000 --kernel epanechnikov
--logging_model_name NNPredictor --target_model_name Tree --loss parabolic --lip 1 --samples 100000 --kernel epanechnikov
--logging_model_name NNPredictor --target_model_name Tree --loss parabolic --lip 3 --samples 100 --kernel boxcar
--logging_model_name NNPredictor --target_model_name Tree --loss parabolic --lip 3 --samples 1000 --kernel boxcar
--logging_model_name NNPredictor --target_model_name Tree --loss parabolic --lip 3 --samples 10000 --kernel boxcar
--logging_model_name NNPredictor --target_model_name Tree --loss parabolic --lip 3 --samples 100000 --kernel boxcar
--logging_model_name NNPredictor --target_model_name Tree --loss parabolic --lip 3 --samples 100 --kernel epanechnikov
--logging_model_name NNPredictor --target_model_name Tree --loss parabolic --lip 3 --samples 1000 --kernel epanechnikov
--logging_model_name NNPredictor --target_model_name Tree --loss parabolic --lip 3 --samples 10000 --kernel epanechnikov
--logging_model_name NNPredictor --target_model_name Tree --loss parabolic --lip 3 --samples 100000 --kernel epanechnikov
--logging_model_name NNPredictor --target_model_name Tree --loss parabolic --lip 10 --samples 100 --kernel boxcar
--logging_model_name NNPredictor --target_model_name Tree --loss parabolic --lip 10 --samples 1000 --kernel boxcar
--logging_model_name NNPredictor --target_model_name Tree --loss parabolic --lip 10 --samples 10000 --kernel boxcar
--logging_model_name NNPredictor --target_model_name Tree --loss parabolic --lip 10 --samples 100000 --kernel boxcar
--logging_model_name NNPredictor --target_model_name Tree --loss parabolic --lip 10 --samples 100 --kernel epanechnikov
--logging_model_name NNPredictor --target_model_name Tree --loss parabolic --lip 10 --samples 1000 --kernel epanechnikov
--logging_model_name NNPredictor --target_model_name Tree --loss parabolic --lip 10 --samples 10000 --kernel epanechnikov
--logging_model_name NNPredictor --target_model_name Tree --loss parabolic --lip 10 --samples 100000 --kernel epanechnikov
--logging_model_name Tree --target_model_name NNPredictor --loss triangular --lip 1 --samples 100 --kernel boxcar
--logging_model_name Tree --target_model_name NNPredictor --loss triangular --lip 1 --samples 1000 --kernel boxcar
--logging_model_name Tree --target_model_name NNPredictor --loss triangular --lip 1 --samples 10000 --kernel boxcar
--logging_model_name Tree --target_model_name NNPredictor --loss triangular --lip 1 --samples 100000 --kernel boxcar
--logging_model_name Tree --target_model_name NNPredictor --loss triangular --lip 1 --samples 100 --kernel epanechnikov
--logging_model_name Tree --target_model_name NNPredictor --loss triangular --lip 1 --samples 1000 --kernel epanechnikov
--logging_model_name Tree --target_model_name NNPredictor --loss triangular --lip 1 --samples 10000 --kernel epanechnikov
--logging_model_name Tree --target_model_name NNPredictor --loss triangular --lip 1 --samples 100000 --kernel epanechnikov
--logging_model_name Tree --target_model_name NNPredictor --loss triangular --lip 3 --samples 100 --kernel boxcar
--logging_model_name Tree --target_model_name NNPredictor --loss triangular --lip 3 --samples 1000 --kernel boxcar
--logging_model_name Tree --target_model_name NNPredictor --loss triangular --lip 3 --samples 10000 --kernel boxcar
--logging_model_name Tree --target_model_name NNPredictor --loss triangular --lip 3 --samples 100000 --kernel boxcar
--logging_model_name Tree --target_model_name NNPredictor --loss triangular --lip 3 --samples 100 --kernel epanechnikov
--logging_model_name Tree --target_model_name NNPredictor --loss triangular --lip 3 --samples 1000 --kernel epanechnikov
--logging_model_name Tree --target_model_name NNPredictor --loss triangular --lip 3 --samples 10000 --kernel epanechnikov
--logging_model_name Tree --target_model_name NNPredictor --loss triangular --lip 3 --samples 100000 --kernel epanechnikov
--logging_model_name Tree --target_model_name NNPredictor --loss triangular --lip 10 --samples 100 --kernel boxcar
--logging_model_name Tree --target_model_name NNPredictor --loss triangular --lip 10 --samples 1000 --kernel boxcar
--logging_model_name Tree --target_model_name NNPredictor --loss triangular --lip 10 --samples 10000 --kernel boxcar
--logging_model_name Tree --target_model_name NNPredictor --loss triangular --lip 10 --samples 100000 --kernel boxcar
--logging_model_name Tree --target_model_name NNPredictor --loss triangular --lip 10 --samples 100 --kernel epanechnikov
--logging_model_name Tree --target_model_name NNPredictor --loss triangular --lip 10 --samples 1000 --kernel epanechnikov
--logging_model_name Tree --target_model_name NNPredictor --loss triangular --lip 10 --samples 10000 --kernel epanechnikov
--logging_model_name Tree --target_model_name NNPredictor --loss triangular --lip 10 --samples 100000 --kernel epanechnikov
--logging_model_name Tree --target_model_name NNPredictor --loss parabolic --lip 1 --samples 100 --kernel boxcar
--logging_model_name Tree --target_model_name NNPredictor --loss parabolic --lip 1 --samples 1000 --kernel boxcar
--logging_model_name Tree --target_model_name NNPredictor --loss parabolic --lip 1 --samples 10000 --kernel boxcar
--logging_model_name Tree --target_model_name NNPredictor --loss parabolic --lip 1 --samples 100000 --kernel boxcar
--logging_model_name Tree --target_model_name NNPredictor --loss parabolic --lip 1 --samples 100 --kernel epanechnikov
--logging_model_name Tree --target_model_name NNPredictor --loss parabolic --lip 1 --samples 1000 --kernel epanechnikov
--logging_model_name Tree --target_model_name NNPredictor --loss parabolic --lip 1 --samples 10000 --kernel epanechnikov
--logging_model_name Tree --target_model_name NNPredictor --loss parabolic --lip 1 --samples 100000 --kernel epanechnikov
--logging_model_name Tree --target_model_name NNPredictor --loss parabolic --lip 3 --samples 100 --kernel boxcar
--logging_model_name Tree --target_model_name NNPredictor --loss parabolic --lip 3 --samples 1000 --kernel boxcar
--logging_model_name Tree --target_model_name NNPredictor --loss parabolic --lip 3 --samples 10000 --kernel boxcar
--logging_model_name Tree --target_model_name NNPredictor --loss parabolic --lip 3 --samples 100000 --kernel boxcar
--logging_model_name Tree --target_model_name NNPredictor --loss parabolic --lip 3 --samples 100 --kernel epanechnikov
--logging_model_name Tree --target_model_name NNPredictor --loss parabolic --lip 3 --samples 1000 --kernel epanechnikov
--logging_model_name Tree --target_model_name NNPredictor --loss parabolic --lip 3 --samples 10000 --kernel epanechnikov
--logging_model_name Tree --target_model_name NNPredictor --loss parabolic --lip 3 --samples 100000 --kernel epanechnikov
--logging_model_name Tree --target_model_name NNPredictor --loss parabolic --lip 10 --samples 100 --kernel boxcar
--logging_model_name Tree --target_model_name NNPredictor --loss parabolic --lip 10 --samples 1000 --kernel boxcar
--logging_model_name Tree --target_model_name NNPredictor --loss parabolic --lip 10 --samples 10000 --kernel boxcar
--logging_model_name Tree --target_model_name NNPredictor --loss parabolic --lip 10 --samples 100000 --kernel boxcar
--logging_model_name Tree --target_model_name NNPredictor --loss parabolic --lip 10 --samples 100 --kernel epanechnikov
--logging_model_name Tree --target_model_name NNPredictor --loss parabolic --lip 10 --samples 1000 --kernel epanechnikov
--logging_model_name Tree --target_model_name NNPredictor --loss parabolic --lip 10 --samples 10000 --kernel epanechnikov
--logging_model_name Tree --target_model_name NNPredictor --loss parabolic --lip 10 --samples 100000 --kernel epanechnikov
--logging_model_name Tree --target_model_name Tree --loss triangular --lip 1 --samples 100 --kernel boxcar
--logging_model_name Tree --target_model_name Tree --loss triangular --lip 1 --samples 1000 --kernel boxcar
--logging_model_name Tree --target_model_name Tree --loss triangular --lip 1 --samples 10000 --kernel boxcar
--logging_model_name Tree --target_model_name Tree --loss triangular --lip 1 --samples 100000 --kernel boxcar
--logging_model_name Tree --target_model_name Tree --loss triangular --lip 1 --samples 100 --kernel epanechnikov
--logging_model_name Tree --target_model_name Tree --loss triangular --lip 1 --samples 1000 --kernel epanechnikov
--logging_model_name Tree --target_model_name Tree --loss triangular --lip 1 --samples 10000 --kernel epanechnikov
--logging_model_name Tree --target_model_name Tree --loss triangular --lip 1 --samples 100000 --kernel epanechnikov
--logging_model_name Tree --target_model_name Tree --loss triangular --lip 3 --samples 100 --kernel boxcar
--logging_model_name Tree --target_model_name Tree --loss triangular --lip 3 --samples 1000 --kernel boxcar
--logging_model_name Tree --target_model_name Tree --loss triangular --lip 3 --samples 10000 --kernel boxcar
--logging_model_name Tree --target_model_name Tree --loss triangular --lip 3 --samples 100000 --kernel boxcar
--logging_model_name Tree --target_model_name Tree --loss triangular --lip 3 --samples 100 --kernel epanechnikov
--logging_model_name Tree --target_model_name Tree --loss triangular --lip 3 --samples 1000 --kernel epanechnikov
--logging_model_name Tree --target_model_name Tree --loss triangular --lip 3 --samples 10000 --kernel epanechnikov
--logging_model_name Tree --target_model_name Tree --loss triangular --lip 3 --samples 100000 --kernel epanechnikov
--logging_model_name Tree --target_model_name Tree --loss triangular --lip 10 --samples 100 --kernel boxcar
--logging_model_name Tree --target_model_name Tree --loss triangular --lip 10 --samples 1000 --kernel boxcar
--logging_model_name Tree --target_model_name Tree --loss triangular --lip 10 --samples 10000 --kernel boxcar
--logging_model_name Tree --target_model_name Tree --loss triangular --lip 10 --samples 100000 --kernel boxcar
--logging_model_name Tree --target_model_name Tree --loss triangular --lip 10 --samples 100 --kernel epanechnikov
--logging_model_name Tree --target_model_name Tree --loss triangular --lip 10 --samples 1000 --kernel epanechnikov
--logging_model_name Tree --target_model_name Tree --loss triangular --lip 10 --samples 10000 --kernel epanechnikov
--logging_model_name Tree --target_model_name Tree --loss triangular --lip 10 --samples 100000 --kernel epanechnikov
--logging_model_name Tree --target_model_name Tree --loss parabolic --lip 1 --samples 100 --kernel boxcar
--logging_model_name Tree --target_model_name Tree --loss parabolic --lip 1 --samples 1000 --kernel boxcar
--logging_model_name Tree --target_model_name Tree --loss parabolic --lip 1 --samples 10000 --kernel boxcar
--logging_model_name Tree --target_model_name Tree --loss parabolic --lip 1 --samples 100000 --kernel boxcar
--logging_model_name Tree --target_model_name Tree --loss parabolic --lip 1 --samples 100 --kernel epanechnikov
--logging_model_name Tree --target_model_name Tree --loss parabolic --lip 1 --samples 1000 --kernel epanechnikov
--logging_model_name Tree --target_model_name Tree --loss parabolic --lip 1 --samples 10000 --kernel epanechnikov
--logging_model_name Tree --target_model_name Tree --loss parabolic --lip 1 --samples 100000 --kernel epanechnikov
--logging_model_name Tree --target_model_name Tree --loss parabolic --lip 3 --samples 100 --kernel boxcar
--logging_model_name Tree --target_model_name Tree --loss parabolic --lip 3 --samples 1000 --kernel boxcar
--logging_model_name Tree --target_model_name Tree --loss parabolic --lip 3 --samples 10000 --kernel boxcar
--logging_model_name Tree --target_model_name Tree --loss parabolic --lip 3 --samples 100000 --kernel boxcar
--logging_model_name Tree --target_model_name Tree --loss parabolic --lip 3 --samples 100 --kernel epanechnikov
--logging_model_name Tree --target_model_name Tree --loss parabolic --lip 3 --samples 1000 --kernel epanechnikov
--logging_model_name Tree --target_model_name Tree --loss parabolic --lip 3 --samples 10000 --kernel epanechnikov
--logging_model_name Tree --target_model_name Tree --loss parabolic --lip 3 --samples 100000 --kernel epanechnikov
--logging_model_name Tree --target_model_name Tree --loss parabolic --lip 10 --samples 100 --kernel boxcar
--logging_model_name Tree --target_model_name Tree --loss parabolic --lip 10 --samples 1000 --kernel boxcar
--logging_model_name Tree --target_model_name Tree --loss parabolic --lip 10 --samples 10000 --kernel boxcar
--logging_model_name Tree --target_model_name Tree --loss parabolic --lip 10 --samples 100000 --kernel boxcar
--logging_model_name Tree --target_model_name Tree --loss parabolic --lip 10 --samples 100 --kernel epanechnikov
--logging_model_name Tree --target_model_name Tree --loss parabolic --lip 10 --samples 1000 --kernel epanechnikov
--logging_model_name Tree --target_model_name Tree --loss parabolic --lip 10 --samples 10000 --kernel epanechnikov
--logging_model_name Tree --target_model_name Tree --loss parabolic --lip 10 --samples 100000 --kernel epanechnikov
Plot JSON¶
# commands = [0,1,2,3,4,5,6,7,8,9]
# iters = 100
commands = [0]
iters = 6
data_dict = {
'Slope': [],
'0.25': [],
'0.03125': [],
}
K = [
'Slope',
'0.25',
'0.03125']
ns = []
data = {
}
for c in commands:
for i in range(1,iters):
x = json.loads(open('./command_num=%d_replicate=%d.json' % (c, i), 'r').readlines()[0])
n = x['samples']
if n not in data.keys():
data[n] = copy.deepcopy(data_dict)
ns.append(n)
for k in K:
data[n][k].append(x[k])
ns.sort()
fig = plt.figure()
ls = []
for k in K:
x = np.array([np.mean(data[n][k]) for n in ns])
z = np.array([np.std(data[n][k]) for n in ns])
ls.append(plt.plot(ns, x,linewidth=2))
plt.fill_between(ns, x - 2/np.sqrt(iters)*z, x + 2/np.sqrt(iters)*z,alpha=0.2)
ax = plt.gca()
ax.set_xscale('log')
ax.set_yscale('log')
ax.set_ylabel('MSE')
ax.set_xlabel('Number of samples')
K[K.index('Slope')] = 'Slope'
plt.legend(K)
plt.savefig('./cb_learning_curve.pdf', format='pdf', dpi=100,bbox_inches='tight')
plt.show()