Counterfactual policy evaluation¶
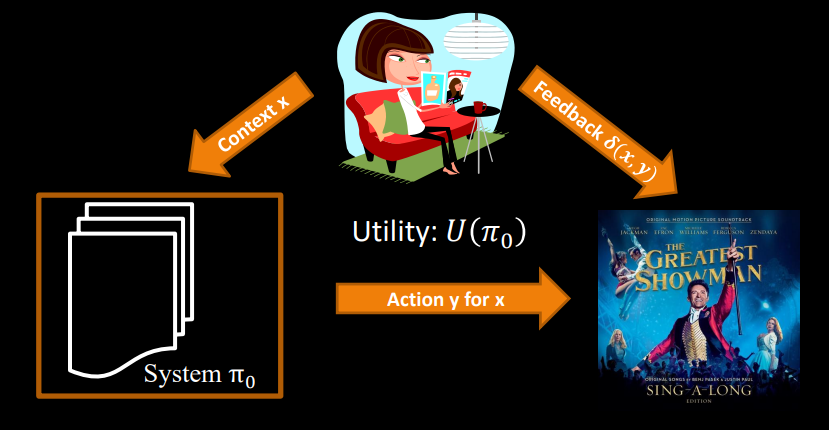
General Formulation: Contextual Bandits¶
Observes context vector \(x\) (e.g., user info)
Policy π selects an action \(y\) (e.g., recommend specific item)
Observes reward/feedback \(\delta(x,y)\) (e.g., click indicator)
Music voice assistant
Context \(x\): User and speech
Action \(y\): Track that is played
Feedback \(\delta(x,y)\): Listened to the end
Netflix banner
Context \(x\): User profile, time of day, day of week
Action \(y\): Movie to put in banner
Feedback \(\delta(x,y)\): Click, complete views, etc.
YouTube recommendations
Context \(x\): Current video, user demographics, past interactions
Action \(y\): Ranking of recommended videos
Feedback \(\delta(x,y)\): Click, downstream dwell time, etc.
News recommender
Context \(x\): User
Action \(y\): Portfolio of news articles
Feedback \(\delta(x,y)\): Reading time in minutes
Hiring
Context \(x\): Set of candidates, job description
Action \(y\): Person that is hired
Feedback \(\delta(x,y)\): Job performance of \(y\)
Medical
Context \(x\): Diagnostics
Action \(y\): BP/Stent/Drugs
Feedback \(\delta(x,y)\): Survival
Search engine
Context \(x\): Query
Action \(y\): Ranking
Feedback \(\delta(x,y)\): Clicks on SERP
Ad placement
Context \(x\): User, page
Action \(y\): Placed Ad
Feedback \(\delta(x,y)\): Click/No click
Online retail
Context \(x\): Category
Action \(y\): Tile layout
Feedback \(\delta(x,y)\): Purchases
Streaming media
Context \(x\): User
Action \(y\): Carousel layout
Feedback \(\delta(x,y)\): Plays
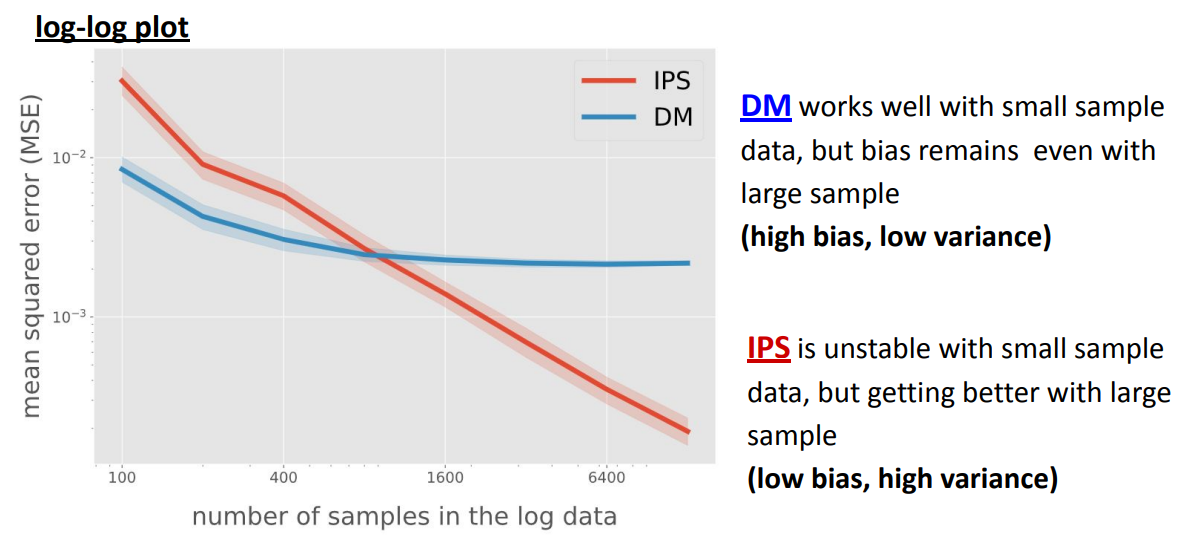
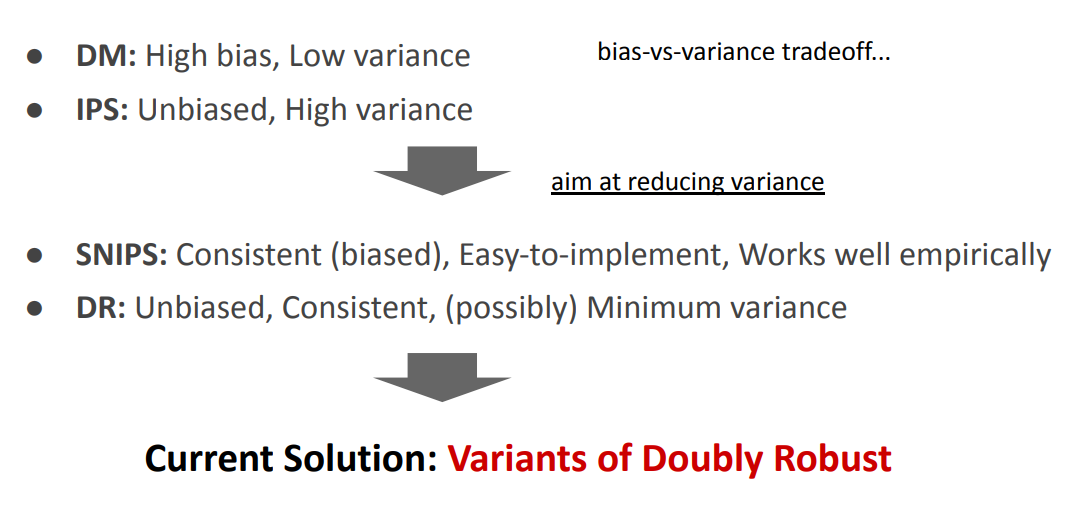
DM vs IPS: Bias-Variance Trade-off¶
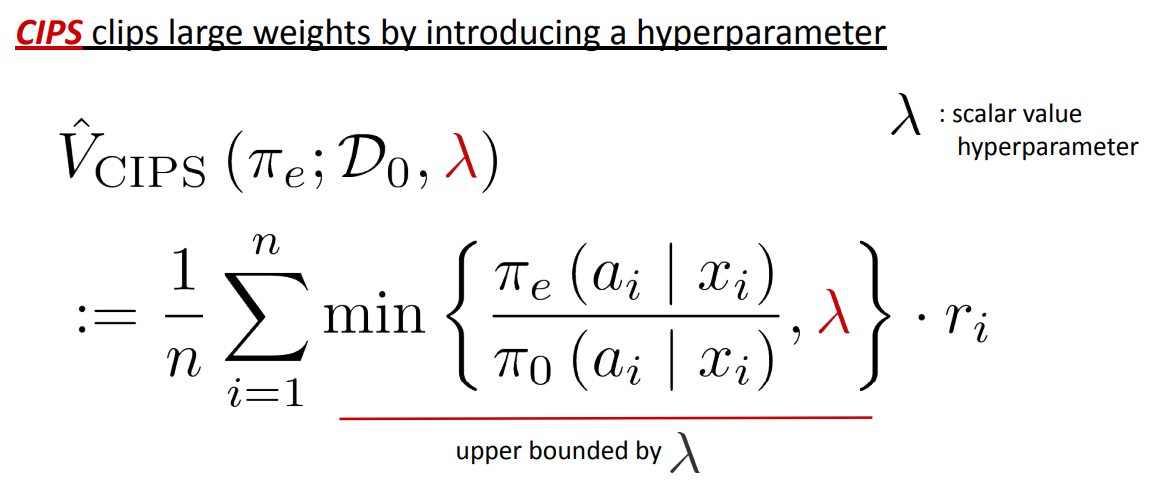
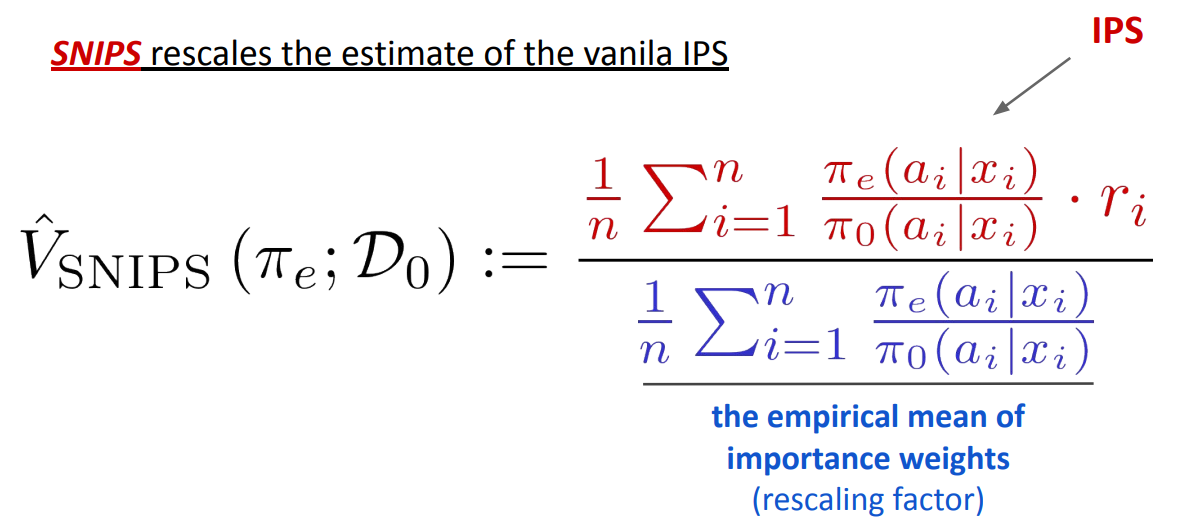
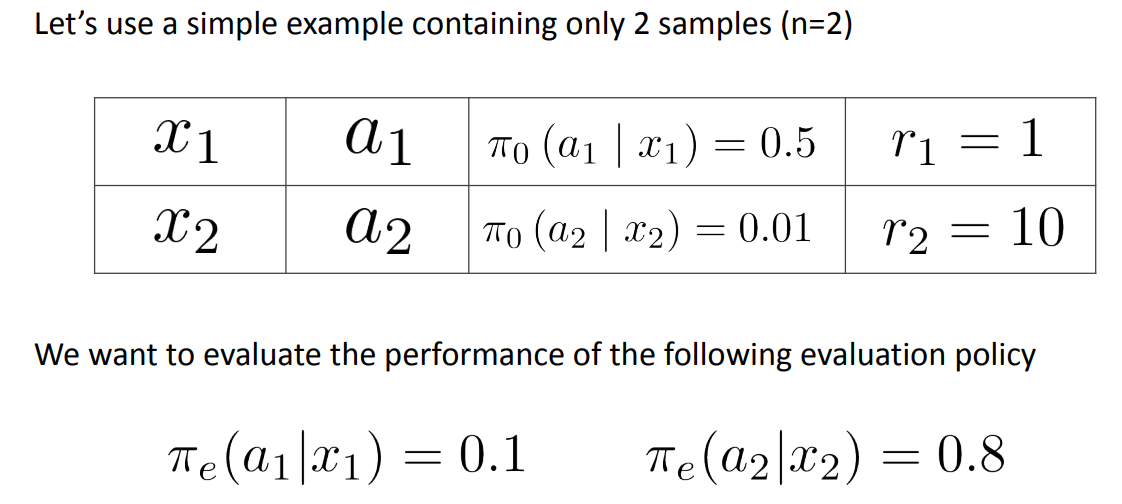
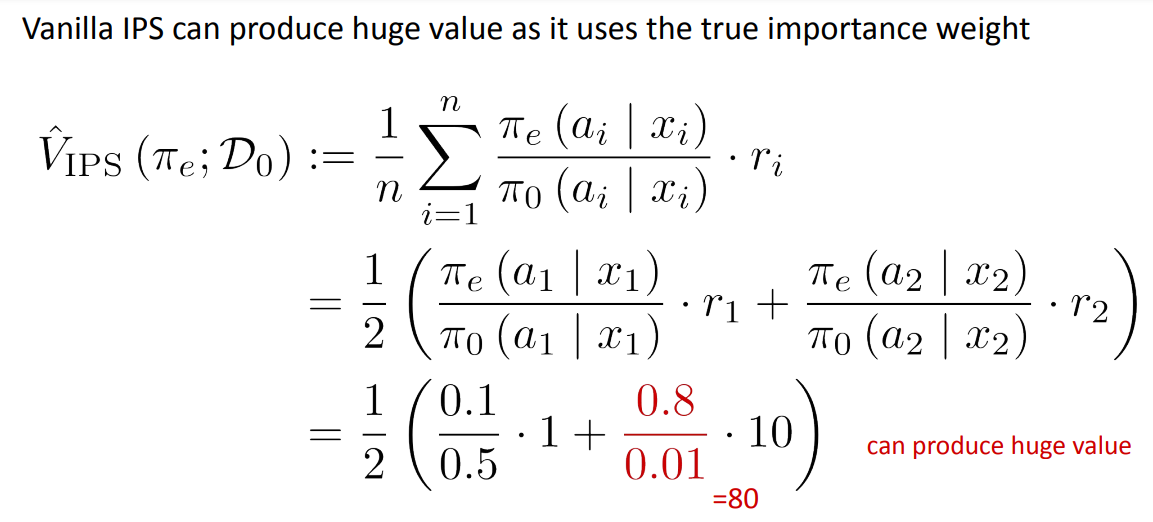
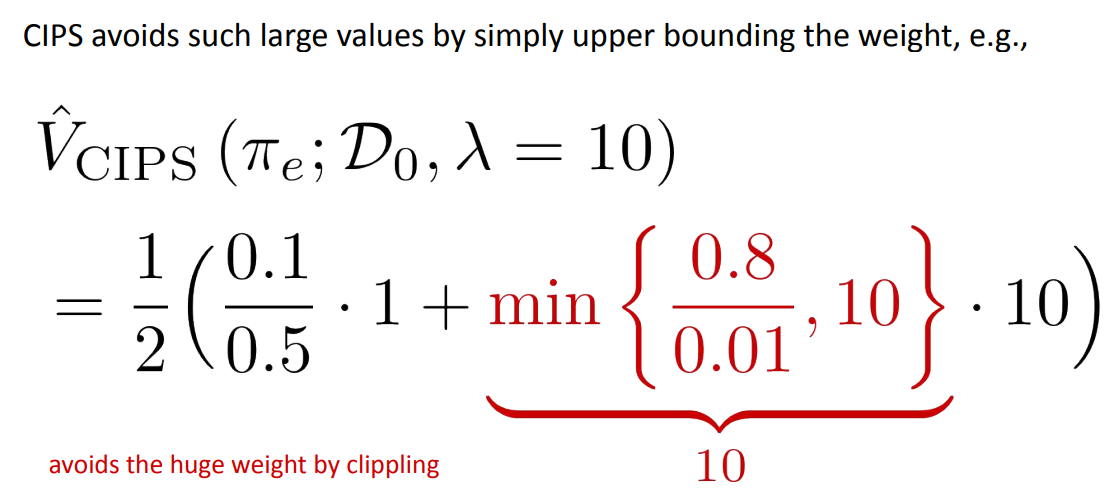
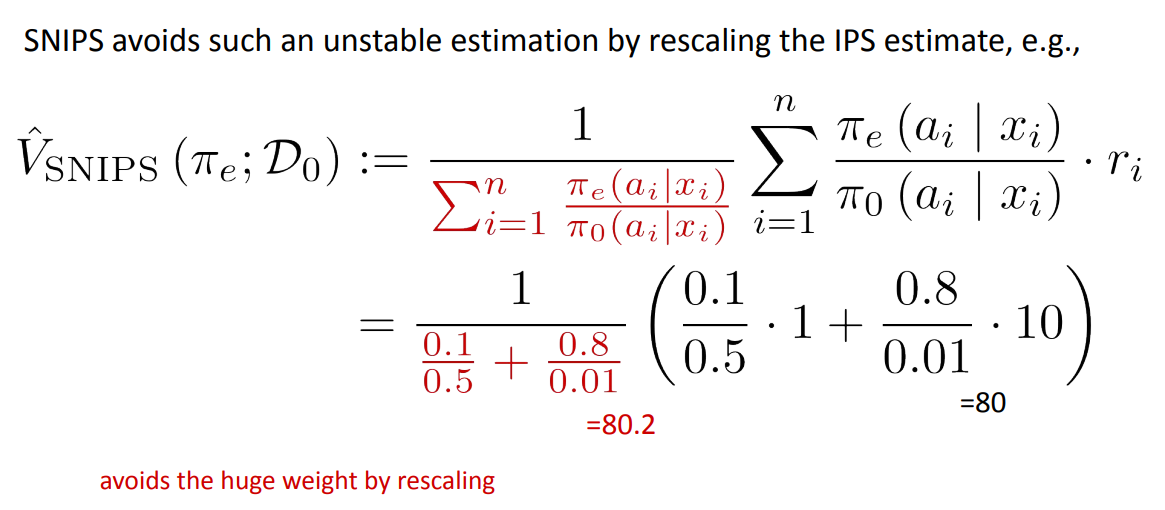
CIPS and SNIPS - techniques to contain the IPS large weights¶
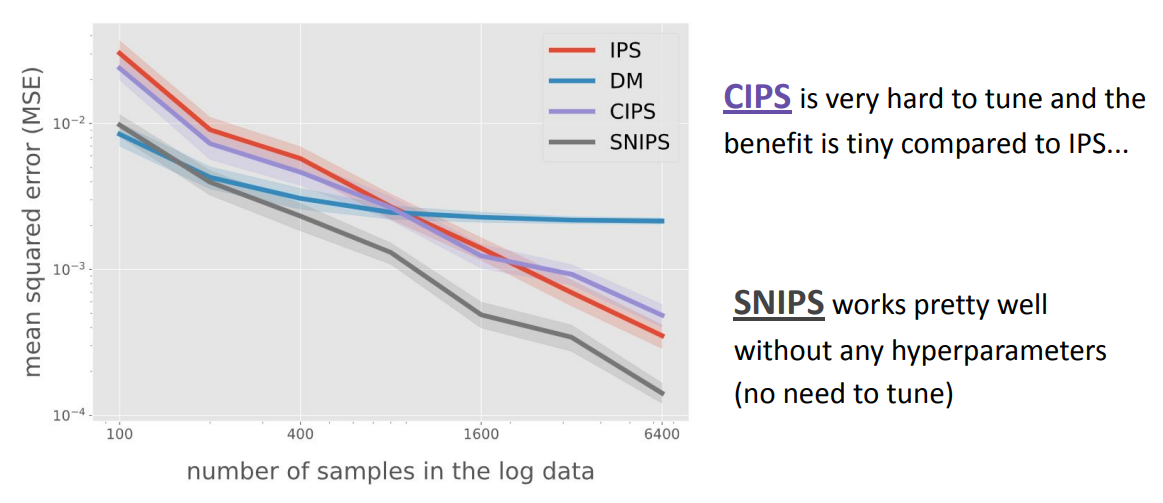
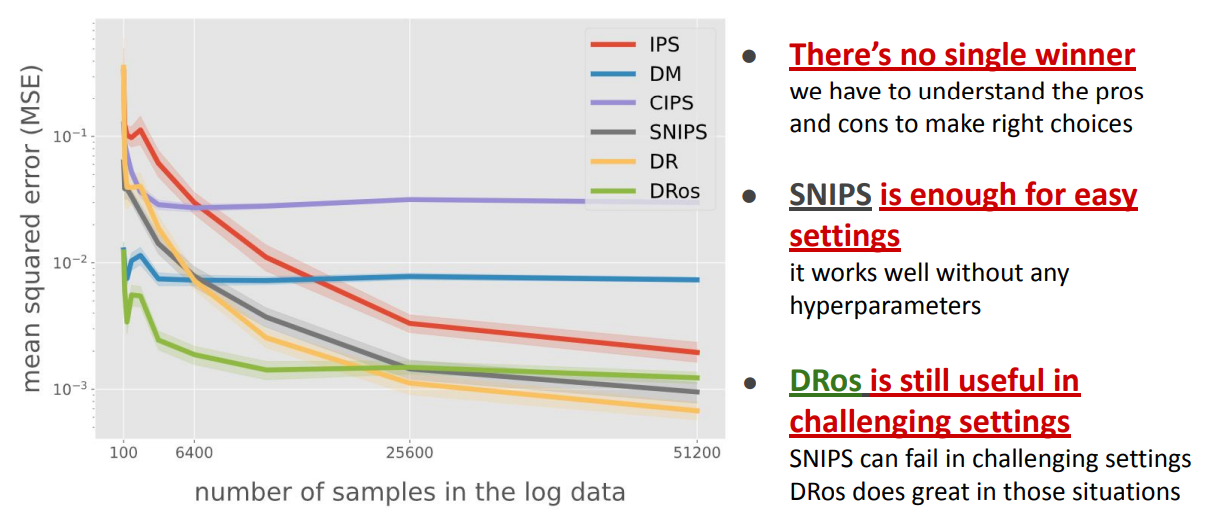
DM vs IPS vs CIPS vs SNIPS (varying sample size).
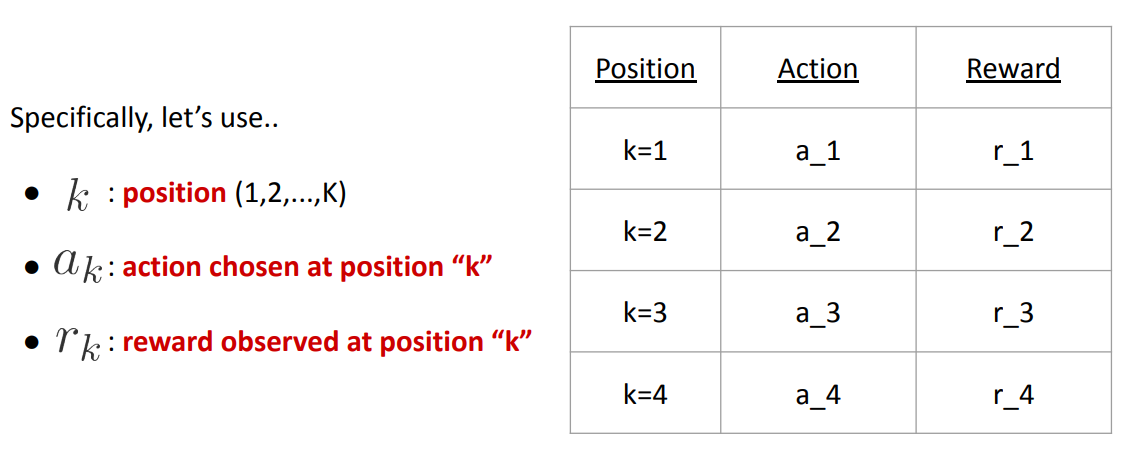
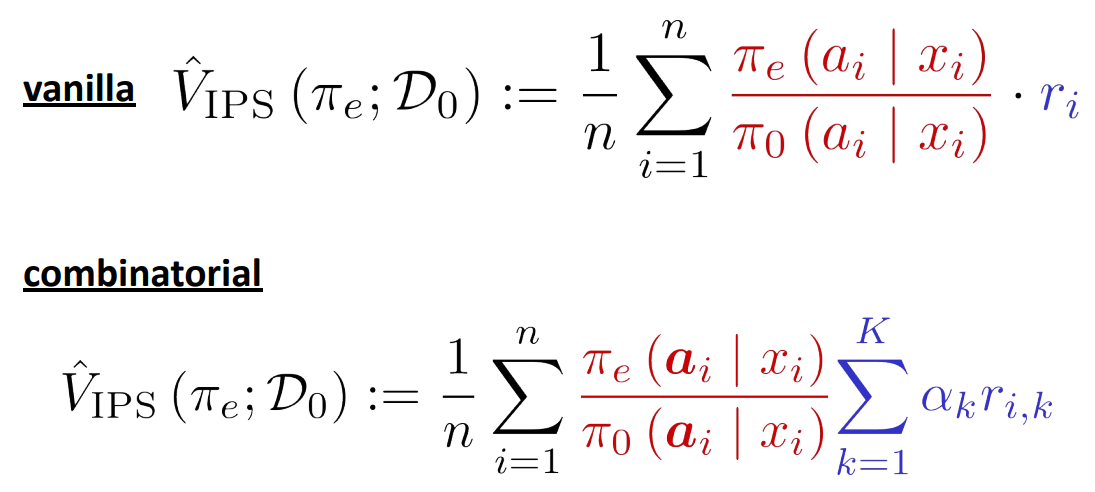
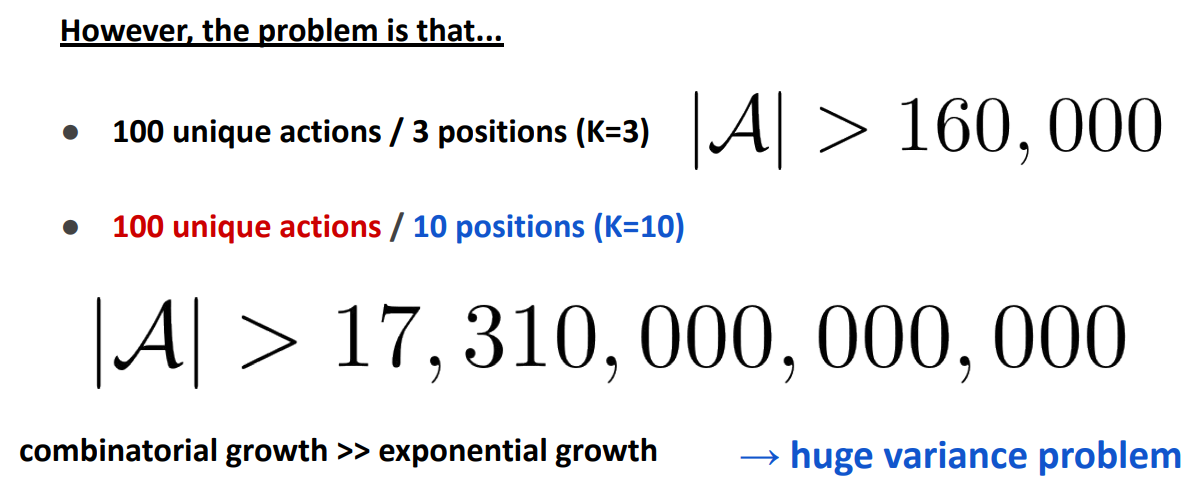
Combinatorial Action¶
In practice, the action space is often combinatorial, and a policy has to choose a set of (discrete) actions at the same time:

We have to modify the formulation a little bit, to adjust to the combinatorial setting:
Even in the combinatorial action setting, we can (naively) use the IPS estimator to get unbiased/consistent estimate:

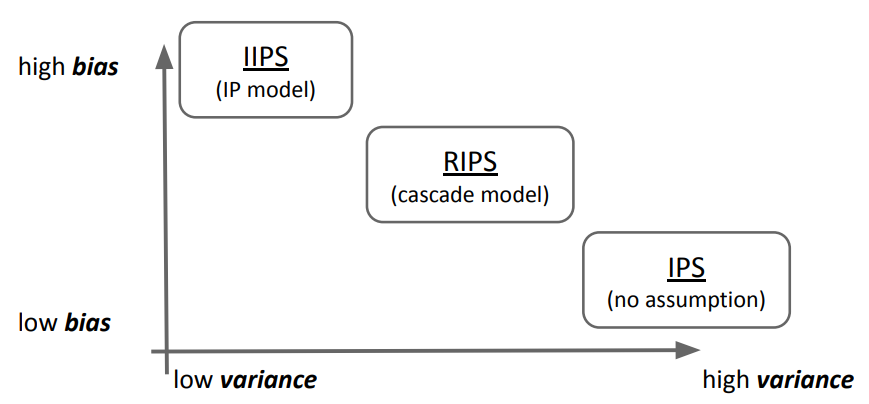
IPS, IIPS and RIPS¶
How to compare OPE/OPL methods in Experiments?¶
In OPL experiments, you as a researcher try to propose a policy learning method that can lead to a better policy value than existing methods.
OPL performance measure:
We have to evaluate the policy value of the proposed and baseline policies and compare.
In OPE experiments, you as a researcher try to propose a OPE estimator that can lead to an accurate MSE (lower MSE) than existing estimators.
OPE performance measure:
We have to evaluate the MSE of the proposed and baseline estimators and compare.